Изучаем ультразвуковой датчик Lego mindstorms EV3
Содержание урока
Введение:
Текущий урок мы посвятим изучению ультразвукового датчика. Данный датчик присутствует только в образовательной версии набора Lego mindstorms EV3. Тем не менее, пользователям домашней версии конструктора советуем тоже обратить внимание на данный урок. Возможно, что прочитав о назначении и использовании этого датчика, вы пожелаете его приобрести в дополнение к своему набору.
7.1. Изучаем ультразвуковой датчик
Главное назначение ультразвукового датчика, это определение расстояния до предметов, находящихся перед ним. Для этого датчик посылает звуковую волну высокой частоты (ультразвук), ловит обратную волну, отраженную от объекта и, замерив время на возвращение ультразвукового импульса, с высокой точностью рассчитывает расстояние до предмета.
Рис. 1
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах.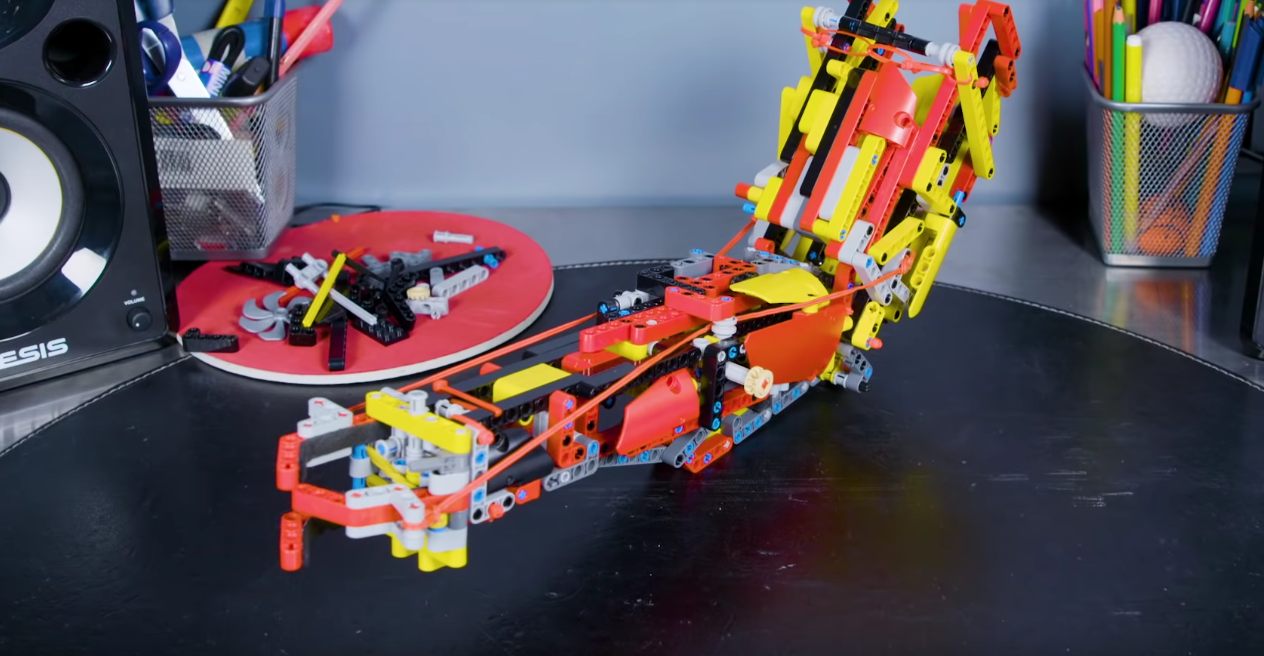
У нашего робота, собранного по инструкции
Задача №14: написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия.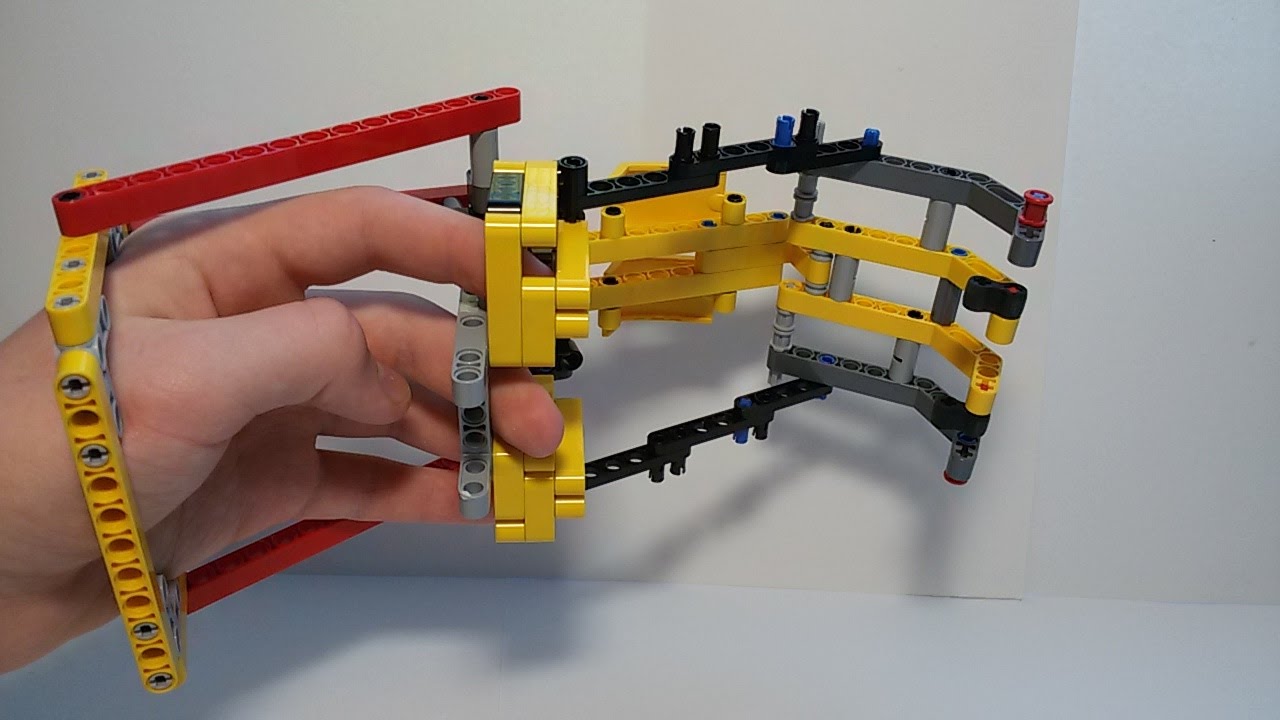
Для решения задачи воспользуемся уже знакомым нам программным блоком «Ожидание» Оранжевой палитры, переключив его в Режим: «Ультразвуковой датчик» — «Сравнение» — «Расстояние в сантиметрах» (Рис. 2)
Рис. 2
Решение:
- Начать прямолинейное движение вперед (Рис. 3 поз. 1)
- Ждать, пока значение ультразвукового датчика не станет меньше 15 см. (Рис. 3 поз. 2)
- Прекратить движение вперед (Рис. 3 поз. 3)
Рис. 3
Задача решена!
Задача №15: написать программу для робота, держащего дистанцию в 15 см от препятствия.
Решение:
Поведение робота будет следующим:
- при значении показания ультразвукового датчика больше 15 см робот будет двигаться вперед, стараясь приблизиться к препятствию;
- при значении показания ультразвукового датчика меньше 15 см робот будет двигаться назад, стараясь удалиться от препятствия.


Мы уже знаем, что за организацию выбора выполняемых блоков в зависимости от условия отвечает программный блок «Переключатель» Оранжевой палитры. Установим для блока «Переключатель» режим «Ультразвуковой датчик» — «Сравнение» — «Расстояние в сантиметрах» (Рис. 4 поз.1)
Рис. 4
Поместим в эти контейнеры программные блоки, включающие движение вперед и назад.
Рис. 5
Загрузите получившуюся программу в робота и запустите ее на выполнение. Если перед роботом отсутствует препятствие, то он поедет вперед. Поднесите руку близко к ультразвуковому датчику, попробуйте отводить — приближать руку. Как ведет себя робот? Ждем ваши комментарии к этому уроку.
7.2. Робот-полицейский
Принцип работы ультразвукового датчика очень похож на радар, который применяется для измерения скорости движущихся автомобилей. Как радар узнаёт скорость автомобиля? Он измеряет расстояние до движущегося объекта, ждёт заданное небольшое время и повторяет измерение. Разность расстояний — это пройденный путь автомобиля. Разделив пройденный путь на время между двумя измерениями, можно найти скорость, с которой двигался объект измерения.
Давайте же научим и нашего робота работе радара!
Рис. 6
Последовательность действий, выполняемых роботом, будет следующей:
- Робот ждёт появления в зоне контроля движущегося объекта;
- измеряет расстояние до объекта;
- ждёт 1 секунду;
- повторно измеряет расстояние до объекта;
- находит пройденное расстояние и сравнивает его с пороговым значением;
- выводит на экран результат и подает тревогу в случае превышения скорости.
Начнём создавать программу для нашего робота-полицейского.
- С помощью программного блока «Ожидание» ждём появления объекта в зоне контроля робота (Рис. 7 поз. 1). Расстояние до объекта передаем в программный блок «Математика» (Рис. 7 поз. 4).
- С помощью программного блока
- Второй раз снимаем показание ультразвукового датчика (Рис. 7 поз. 3) и передаем полученное значение в программный блок «Математика» (Рис. 7 поз. 4).
- В программном блоке «Математика» находим расстояние, пройденное объектом измерения за 1 секунду. Полученное значение передаем в программный блок «Сравнение» (Рис. 7 поз. 5) и выводим на экран (Рис. 7 поз. 6).
- С помощью программного блока «Сравнение» (Рис. 7 поз. 5)
- С помощью программного блока «Переключатель» мы организуем две ветки поведения программы в зависимости от скорости объекта. Если объект за 1 секунду приблизился к роботу, больше чем на 10 см, значит, будем считать его приближение критическим и подадим сигналы тревоги (Рис. 7 поз. 8). В противном случае будем считать, что объект движется медленно, в этом случае робот включит зеленую подсветку клавиш модуля EV3 и произнесёт «Okay».
- В конце программы еще раз воспользуемся программным блоком «Ожидание» (Рис. 7 поз. 10) и «придержим» завершение программы на 5 секунд, чтобы успеть прочитать информацию на экране модуля EV3.
 7 поз. 3) и передаем полученное значение в программный блок «Математика» (Рис. 7 поз. 4).
7 поз. 3) и передаем полученное значение в программный блок «Математика» (Рис. 7 поз. 4).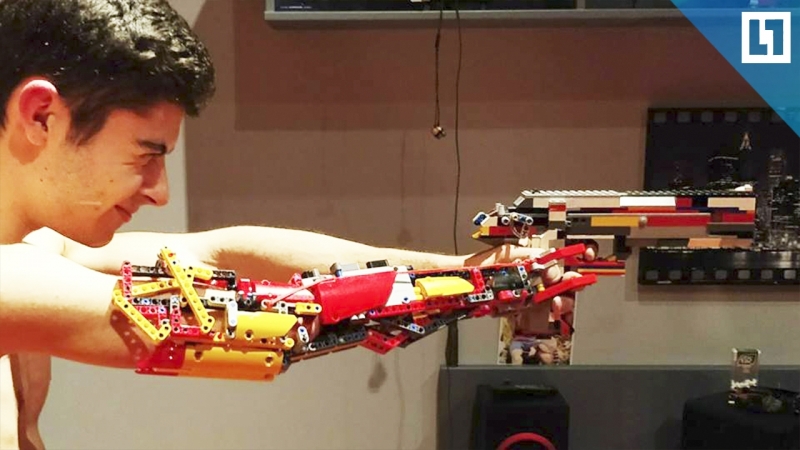 (В дальнейшем мы подробнее ознакомимся с принципами обработки логических значений).
(В дальнейшем мы подробнее ознакомимся с принципами обработки логических значений).Рис. 7
Загрузите программу в робота, расположите робота так, чтобы перед ним на расстоянии 60 сантиметров отсутствовали другие предметы, запустите программу на выполнение. Перемещайте в направлении к роботу игрушечный автомобиль или объемный предмет, наблюдайте за реакцией робота. Попробуйте изменять пороговые значения в программе. Как изменяется поведение робота? Опишите свои наблюдения в комментарии к этому уроку.
Перемещайте в направлении к роботу игрушечный автомобиль или объемный предмет, наблюдайте за реакцией робота. Попробуйте изменять пороговые значения в программе. Как изменяется поведение робота? Опишите свои наблюдения в комментарии к этому уроку.
7.3. Ультразвуковой датчик — режим «Присутствие/слушать»
Как уже отмечалось выше, в этом режиме ультразвуковой датчик способен обнаруживать излучение другого ультразвукового датчика. Результатом обнаружения является логическое значение:
Задача № 16: необходимо написать программу, обнаруживающую другого робота, с работающим ультразвуковым датчиком.
Попробуйте написать программу самостоятельно, не подглядывая в решение!
Решение Задачи №16 Используя знания, полученные ранее, попробуйте самостоятельно разобрать вариант решения Задачи №16. Предложите свой вариант решения…
Предложите свой вариант решения…
Рука об руку с LEGO: как стартап продолжает идею советских конструкторов
Мы же работаем в области нейрообразования. И наша основная задача заключается в том, чтобы дать представление будущим специалистам, которые и будут двигать этот рынок дальше. Для этого мы развиваем олимпиадное движение в области нейротехнологий и биосигналов человека, например, мы сейчас активно работаем над профилем «Нейротехнологии» в рамках олимпиады НТИ, разрабатываем с партнерами качественные учебно-методические материалы, привлекаем ведущих специалистов к научно-технической разработке образовательной инфраструктуры.
— Есть ли запрос со стороны школ?
— Такой запрос есть. Мы активно работаем со школами, кружками, технопарками и ЦМИТ-ами (Центрами молодежного инновационного творчества, — прим. Indicator.Ru). Действует и программа обучения для преподавателей. Родители хотят дать своим детям возможность поработать с новыми технологиями, попробовать себя в новых и актуальных научно-технических направлениях.
Необходимо прививать детям современные навыки, чтобы они могли быть полезными, чтобы они нашли себя в будущем. В этом смысле наша образовательная платформа по нейротехнологиям дает эту базу. Например, современные средства протезирования, миниатюрные средства мониторинга здоровья, нейросетевые алгоритмы — очень интересные направления, и они будут с каждым годом набирать сумасшедшие обороты.
— Есть ли в мире аналоги нашим продуктам в сфере нейрообразования или нейротехнологий?
— С точки зрения работы с биосигналами человека можно отметить несколько интересных проектов, в частности, в США, Португалии, Германии. С точки зрения образовательной платформы в области нейротехнологий, включающей в себя учебно-методические материалы, лабораторные и инженерные проекты для детей, адаптированное программное обеспечение и аппаратные сенсоры, то мы пока первые.
Подписывайтесь на Indicator.Ru в соцсетях: Facebook, ВКонтакте, Twitter, Telegram, Одноклассники.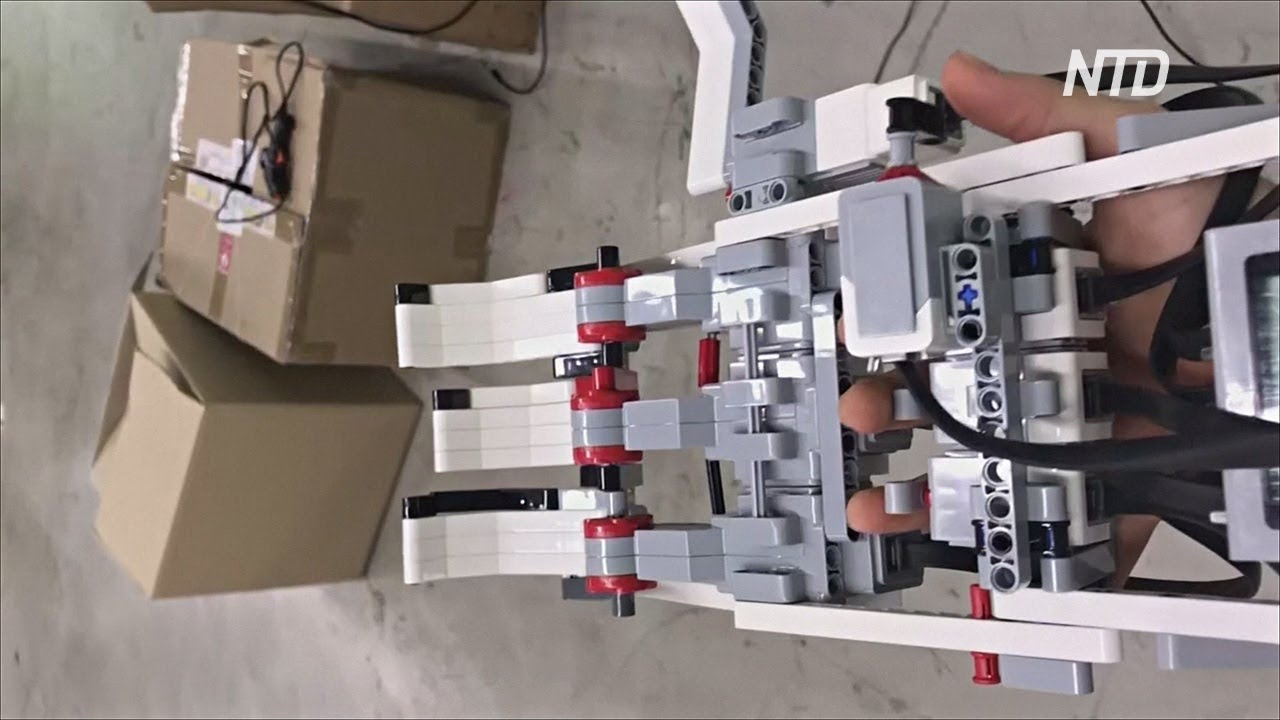
Роботизированная рука на базе LEGO Mindstorm NXT. Пошаговая инструкция по созданию
Содержание:- Введение
- Видеопрезентация работы
- Шаг 1. Основа конструкции
- Шаг 2. Модуль вращения
- Шаг 3. Модуль наклона
- Шаг 4. Модуль захвата
- Шаг 5. Установка датчиков и проводов
- Шаг 6. Добавьте блок NXT
- Шаг 7. Приведение робота в порядок. Последние штрихи
- Шаг 8. Программирование
- Робот готов
Введение:
В данной инструкции мы расскажем вам, как можно построить самостоятельно роботизированную руку с комплектом Lego Mindstorms NXT. На самом деле, в этой инструкции автор хотел сделать штатив для своей камеры. Но это оказалось трудным заданием. После нескольких экспериментов автору удалось сделать простую роботизированную руку.
Если вы также хотите построить это устройство, вам необходимы:
- комплект Lego Mindstorms NXT
- компьютер
- свободное время.

- Не усложняйте ничего!
- Следуйте указаниям с точностью.
Видеопрезентация работы:
Шаг 1. Основа конструкции:
Основа, вероятно, является самой простой частью робота. Это всего лишь платформа для стационарного положения робота. Вы должны убедиться в том, что она длинная и достаточно широкая. Центр тяжести должен находиться где-то на верхней части основы, если это возможно, в середине. В другом случае, робот упадет.
Основа состоит из несколько деталей, которые поддерживают робота.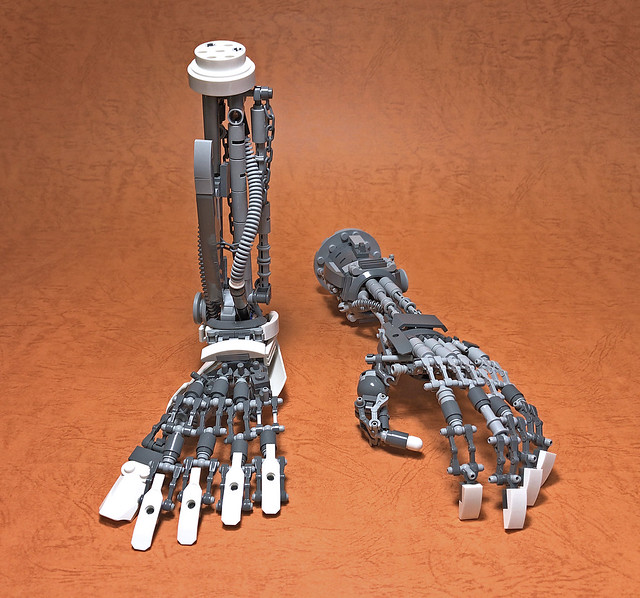 Более сложные роботизированные руки имеют двигатели в основе. Эти двигатели перемещают руку, не двигая себя. Как правило, основа имеет двигатель, который вращает руку, но данная рука вращается сама.
Более сложные роботизированные руки имеют двигатели в основе. Эти двигатели перемещают руку, не двигая себя. Как правило, основа имеет двигатель, который вращает руку, но данная рука вращается сама.
Вы можете быть гораздо более творческими со строительством робота, чем демонстрация в этой инструкции.
Шаг 2. Модуль вращения:
Это один из редких роботов, которые строятся из модулей. Данная рука робота состоит из трех модулей, один из которых является модулем вращения.
Это очень простой механизм. Он вращает руку влево и вправо, и поддерживает два других модуля. Он основан на суставе Matthias Paul Scholz вращения на 90 градусов, который вы можете найти здесь: http://mynxt.matthiaspaulscholz.eu/robots/motor90/index.html
Шаг 3. Модуль наклона:
Второй модуль является модулем наклона. Он расположен на вершине «модуля вращения». В принципе, у вас есть большое зубчатое колесо и небольшой механизм, который вращается вокруг большого колеса. Передача составляет 1:10. Таким образом, рука может вращаться очень точно.
Передача составляет 1:10. Таким образом, рука может вращаться очень точно.
На вершине этого модуля есть небольшая платформа, на которую крепится захват-коготь, но об этом мы расскажем позже.
Установка двух модулей вместе не может быть проще. Они удерживаются вместе с помощью одного вала-оси, вокруг которого вращается модуль наклона. Рука может наклоняться почти на 90 градусов, что является существенным показателем.
Шаг 4. Модуль захвата:
Это самый простой из трех модулей. Конструкция сочетает в себе самые основные виды когтей-захватов. Этот модуль крепится к платформе на модуле наклона.
Здесь, в принципе, всё ясно. Следуйте по картинкам при построении этого механизма.
Шаг 5. Установка датчиков и проводов:
Вам придется использовать три датчика: датчик света, сенсорный и звуковой датчики.
Датчик света (порт 3) находится на захвате и позволяет роботу знать, если ли на полу шарик, или нет (он также может распознать цвет шарика). Два других датчика расположены на платформе модуля наклона. Сенсорный датчик (порт 1) служит своего рода кнопкой для прикосновения, в то время как звуковой датчик (порт 2) измеряет уровень шума (вы можете давать роботу команды хлопками).
Два других датчика расположены на платформе модуля наклона. Сенсорный датчик (порт 1) служит своего рода кнопкой для прикосновения, в то время как звуковой датчик (порт 2) измеряет уровень шума (вы можете давать роботу команды хлопками).
Теперь вам нужно подключить провода к роботу. Вы должны убедиться, что провода не мешают движениям и функциям робота. Вы должны также рассмотреть длину проводов для каждого датчика или двигателя.
Провода:
- сенсорный датчик -> порт 1
- датчик звука -> порт 2
- датчик света -> порт 3
- модуль вращения -> порт A
- модуль наклона -> порт B
- захват -> порт C.
Шаг 6. Добавьте блок NXT:
Блок NXT играет жизненно важную роль для роботов Mindstorms NXT, так что вы должны разместить его где-то на роботе (или по крайней мере где-то рядом). В данном случае только два блока держаться вместе – блок NXT и основа робота. Это очень практично, чтобы объект находился на основе робота, так как это делает его более стабильным.
Шаг 7. Приведение робота в порядок. Последние штрихи:
Когда вы будете довольны тем, как робот работает, можете приложить немного усилий касательно внешнего вида робота (только не забудьте первое правило). Как видите, в инструкции для «украшения» робота используются несколько оранжевых блоков, которые поставляются с комплектом NXT, но не используются для основной конструкции. Вы можете проявить больше фантазии в этом пункте.
Шаг 8. Программирование:
Есть 5 языков программирования, которые вы можете использовать: NXT-G (язык по умолчанию), NXC (не совсем C), Robolab, RobotC, pbLua и NXJ. В данном случае был использован NXT-G.
У вас есть свободный выбор программирования, поэтому не будем говорить об этом больше.
Робот готов:
Ваш робот готов. Вы можете посмотреть на видео, как он работает. Это действительно интересная штука.
Робот Wall-e LEGO® Mindstorms® EV3
АВТОР: ALEX (Алексей Валуев)
- робот передвигается с помощью гусениц;
- умеет крутить головой синхронно с руками;
- при запуске робот поднимает руку и говорит «WALL-E»;
- отходит назад, если поднести к глазам предмет;
- при нажатии верхней кнопки на модуле EV3 говорит «Eve» и начинает искать подружку Еву, пока вы не нажмёте нижнюю кнопку, после этого программа завершается.
Валли LEGO EV3 (WALL-E) ищет Еву (Eve)
- большими моторами крутятся гусеницы;
- средним мотором крутится голова и поднимаются/опускаются руки;
- вручную поворачиваются кисти и пальцы, поднимаются или опускаются брови и половинки головы.
Валли LEGO EV3 (WALL-E) удивляется
- роботом можно управлять с помощью бесплатного приложения LEGO Mindstorms Commander (доступно для Android и iOS).
Валли LEGO EV3 (WALL-E) - управление из приложения LEGO MINDSTORMS Commander
Управление роботом на видео производится с помощью гироскопа телефона. Вот так выглядит пульт и настройки элементов управления:
Вот так выглядит пульт и настройки элементов управления:
При установке кнопки 2-AXIS TILT на пульт для больших моторов порты по умолчанию стоят по-другому. Чтобы поменять порты местами и сделать как на картинке, сначала для левого мотора выберите порт D, затем правому поставьте порт B и после этого левому мотору выставьте порт C.
-> Загрузить и установить среду разработчика LEGO Mindstorms Education (LME) EV3 ( Система Графического Программирования для LEGO Учитель/Ученик)<-
Открыть или загрузить рабочие чертежи робота Wall-e в формате .PDF
Скачать и загрузить рабочую программу робота Wall-e в формате .EV3 (формат Системы Графического Программирования для LEGO)
С Lego здорово дружить! « Академия цифровых технологий
С Lego здорово дружить!
Современное образовательное пространство стало площадкой для проведения «Дней программирования LEGO Education». С 12 по 13 ноября специалисты знаменитой компании делятся с гостями знаниями информатики, программирования и робототехники.
С 12 по 13 ноября специалисты знаменитой компании делятся с гостями знаниями информатики, программирования и робототехники.
Уроки робототехники могут быть интересными и познавательными, если предложить ученикам собрать модель из конструктора Lego. В этом смогли убедиться педагоги образовательных учреждений Петербурга, школьники и их родители на необычных мастер-классах в «Академии цифровых технологий» .
Из Москвы в Петербург приехали тренеры и преподаватели, чтобы презентовать новые решения «LEGO Education» в рамках образовательных программ. Компания разработала новые наборы конструктора Lego, которые планирует выпустить для продажи в январе следующего года. Материал можно использовать на занятиях по робототехнике как в школе, так и на дополнительных занятиях.
Представители организации говорят, что им интересно понять, насколько это увлекательно и чем полезно, поэтому они предлагают протестировать демонстрационные комплекты детям и взрослым. Участники мастер-классов – «SPIKE PRIME», «WEDO 2.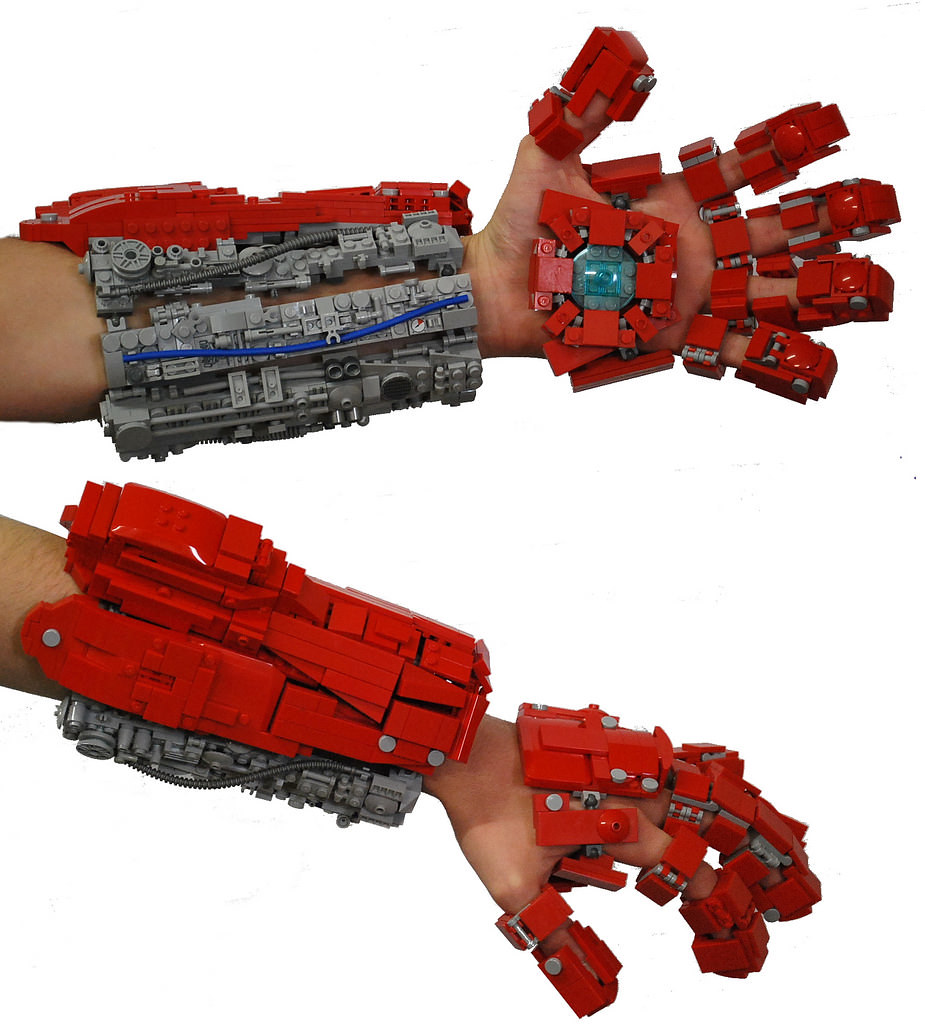 0» и «LEGO EV3» – самостоятельно собирают различных роботов.
0» и «LEGO EV3» – самостоятельно собирают различных роботов.
В кабинетах Академии за два дня петербуржцы могут своими руками сделать механическую руку, которая сможет перемещать детали и грузы, или умный вентилятор, реагирующий на приближение и удаление человека от объекта, а еще сконструировать машину, запрограммировать устройство с помощью специального программного обеспечения на планшете, и поучаствовать в мини-соревнованиях на скорость.
Основная цель мероприятия – обучение педагогов современным образовательным решениям. Такие наборы позволяют сделать подачу информации на занятии более понятной для детей, им легче и любопытней заниматься, а также понимать, как устроен робот и каким образом его можно запрограммировать. Демонстрационным комплектом могут воспользоваться учащиеся 5-7 классов. Он позволяет на базовом уровне освоить основы программирования и робототехники.
«С помощью данных решений мы можем давать современный подход, современные компетенции и навыки, которые необходимы ребенку во взрослой жизни, начиная с начальной школы. По сути, это начальные основы проектной деятельности», – комментирует презентацию тренер «LEGO Education», Андрей Пешков.
По сути, это начальные основы проектной деятельности», – комментирует презентацию тренер «LEGO Education», Андрей Пешков.
Поучаствовать в мастер-классах смогли и педагоги Академии , которые ведут занятия в объединениях по робототехнике. Вместе с другими участниками они получили в подарок наборы конструктора Lego, каталоги продукции и сертификат о прохождении программы обучения.
lego LEGO Education Академия Цифровых технологий Дополнительное образование
Как увлечь детей программированием: методика LEGO Education | GeekBrains
Подкаст «Выхожу с понедельника» — выпуск № 11
https://d2xzmw6cctk25h.cloudfront.net/post/2424/og_image/dfe6ec6499ab0e3fc0579c8013cb1287.png
Собираешь кубики LEGO. Интересно. Собираешь кубики кода для кубиков LEGO. Интересно. Пишешь код с нуля на Python для того же LEGO. Всё ещё интересно. Потом приходишь в себя на каком-нибудь международном соревновании по робототехнике, демонстрируя механическую руку, управляемую мозговыми импульсами при участии нейросетей.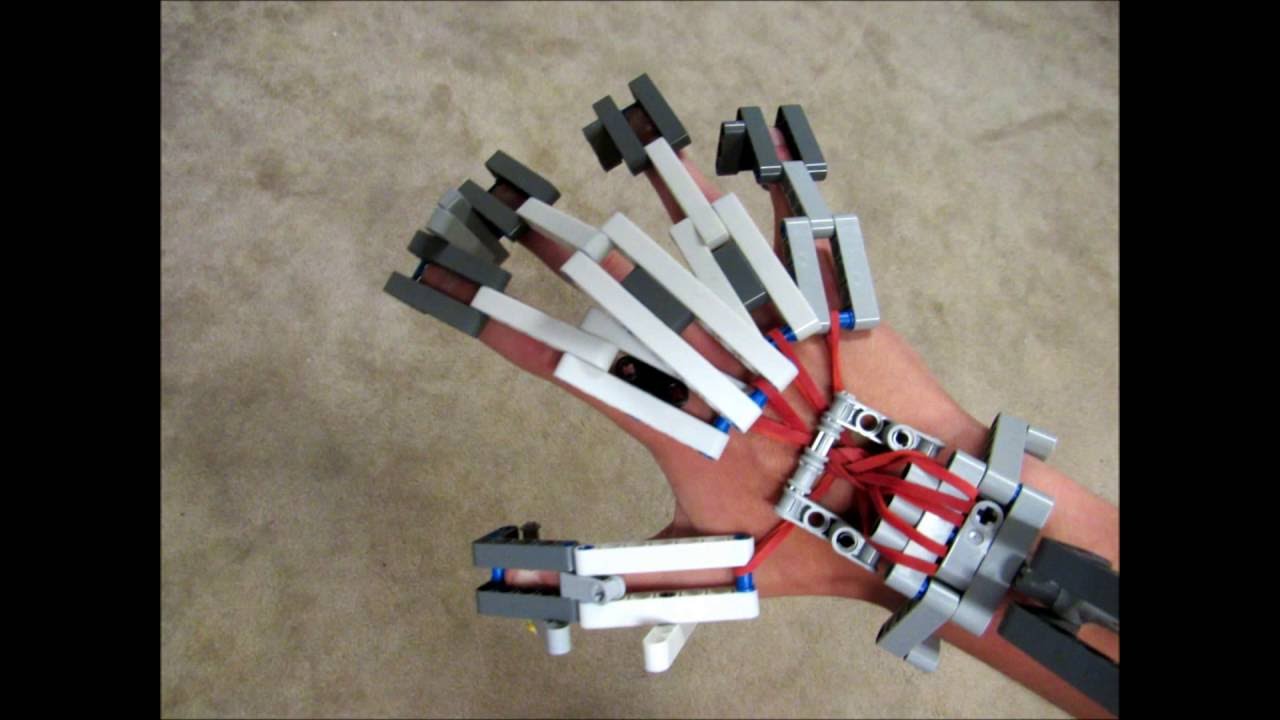 И рука, кстати, тоже из LEGO 😉
И рука, кстати, тоже из LEGO 😉
Мы немножко сократили историю в середине, но, в принципе, это вполне реальный путь для ребёнка, который увлёкся программированием с помощью наборов LEGO Education. Чтобы разобраться, как такое возможно, мы пригласили в подкаст GeekBrains Максима Васильева — сертифицированного тренера Академии LEGO Education, президента МАСОР (Международной ассоциации спортивной и образовательной робототехники). Максим готовит команды и организовывает участие российской сборной на Всемирной олимпиаде роботов.
11-й выпуск подкаста можно послушать на разных платформах:
В этом посте мы собрали интересные цитаты из выпуска.
Об использовании LEGO в обучении
— Опыт использования развивающих и обучающих решений LEGO огромен. Куда интереснее разыгрывать не абстрактную сценку, а такую, где человечки LEGO общаются друг с другом на английском языке. Есть материалы для педагогов, как организовать процесс с использованием LEGO, чтобы эффективно учить английскому или математике. Когда, помимо непосредственной языковой активности, дети что-то собирают руками, задействованы все органы чувств, эффективность обучения существенно повышается.
Когда, помимо непосредственной языковой активности, дети что-то собирают руками, задействованы все органы чувств, эффективность обучения существенно повышается.
— С одной стороны, Python достаточно прост в синтаксисе, с другой — он позволяет писать очень сложные вещи. Сайты некоторых очень крупных компаний, уровня Microsoft, написаны на Python. Также он используется для управления роботами. Операционная система микроконтроллера SPIKE Prime тоже написана на Python. Это продвинутый, серьёзный язык, позволяющий тем, кто его знает, применить навыки на практике и найти хорошую работу.
— Решения LEGO Education, например, MINDSTORMS EV3, можно программировать почти на чём угодно. Они уже семь лет на рынке, и открытая платформа решения позволяет разработчикам создавать любой код, любые интерпретаторы. EV3 можно программировать на Java, Basic, C, Python, LabVIEW.
— Нужно понимать, что решения LEGO Education — не для создания суперроботов с супервозможностями. Конечно, если компания захочет, она сможет сделать и таких роботов, и, наверное, найдутся желающие купить. Но цена на такой продукт будет высокой. У более сложного решения, сделанного с помощью дорогих технологий, стоимость выше, поэтому оно менее доступно для массового использования. SPIKE хорош тем, что он, во-первых, дешевле, во-вторых, не сильно уступает предыдущему поколению EV3 по возможностям. В чём-то EV3 сильнее, но обычно 99% людей эти дополнительные возможности не используют.
Но цена на такой продукт будет высокой. У более сложного решения, сделанного с помощью дорогих технологий, стоимость выше, поэтому оно менее доступно для массового использования. SPIKE хорош тем, что он, во-первых, дешевле, во-вторых, не сильно уступает предыдущему поколению EV3 по возможностям. В чём-то EV3 сильнее, но обычно 99% людей эти дополнительные возможности не используют.
— У LEGO Education нет задачи научить детей собирать LEGO. Задача — через этот инструмент и интерес детей к игре развить их творческие способности, изобретательские таланты, научить программированию. Сделать так, чтобы они глубже понимали математику, физические процессы — например, трение. А сборка робота — это инструмент.
О том, как меняется обучение детей
— Процесс обучения очень изменился в последние годы. Сама роль учителя стала другой. Если раньше он должен был дать знания, то сейчас информация как таковая ценность потеряла, потому что ответ на любой вопрос можно легко найти, всё доступно. Поэтому роль учителя теперь — координатор.
Поэтому роль учителя теперь — координатор.
— Образование — довольно консервативная сфера. Учителя привыкли учить так, как делали это 20 лет назад, хотя это уже не так эффективно. Эффективнее строить обучение через деятельность.
— Сейчас, наверное, во всех школах уже есть роботы. Где-то они используются больше, где-то меньше, где-то вообще не используются, а лежат на полочке.
Гитара на основе LEGO SPIKE Prime. Источник: канал Daniele Benedettelli
— В обычном магазине LEGO SPIKE Prime не приобрести. Можно заказать через интернет. Это политика компании: решение предназначено для обучения, и родители, люди, которые приобретают конструкторы, должны понимать, что в него, конечно, можно играть, но ребёнку самостоятельно будет сложно справиться. Он потеряет мотивацию и интерес достаточно быстро, потому что цель в другом — не поиграть, а поучиться. Поэтому нужен педагог.
— На начальных этапах я даю схему и ученик собирает по ней машинку. Иногда в схеме может чего-то не хватать, и нужно догадаться, чего именно. Например, у машинки может не быть манипулятора для захвата и нужно собрать его самому. Робота нужно доработать, а это развивает творческие способности.
Иногда в схеме может чего-то не хватать, и нужно догадаться, чего именно. Например, у машинки может не быть манипулятора для захвата и нужно собрать его самому. Робота нужно доработать, а это развивает творческие способности.
— На обучающей платформе даётся пример программы. Это может быть методика, как заставить робота поехать. Ученик видит пример, где робот движется, и понимает, что может что-то менять: увеличить скорость, заставить повернуть или сделать так, чтобы он начал ездить на разные расстояния. Робот должен выполнить определённую задачу, а значит, нужно доработать его исходя из того, что ребёнок видел и только что узнал. Это следующий этап.
— Последний этап урока — нужно уметь презентовать созданное решение. В России это большая проблема. У нас много изобретателей, мы умеем придумывать классные вещи, но не знаем, как их вывести на рынок, сделать полезный для всех продукт. Эту компетенцию нужно развивать с самого раннего возраста, чтобы дети умели рассказать, что они сделали.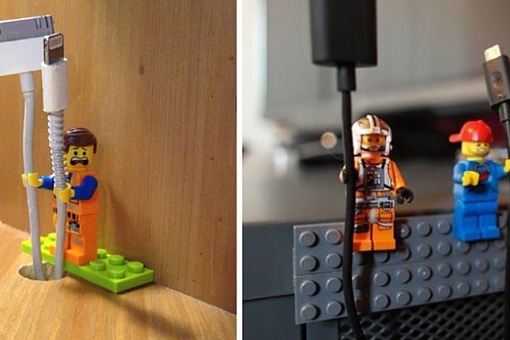
О полезности программирования в принципе
— Раньше было неважно, понял ты тему или нет. Если нет, скорее всего, из тебя программист не получится — но это не страшно, найдутся другие. А сейчас программировать нужно уметь всем, это тренд. Сейчас всё больше устройств, сложной бытовой техники, вроде стиральных машин и микроволновых печей, где нужно выбирать программы, работать с умным домом, с интерактивной техникой.
— Программисты мыслят и решают задачи, даже бытового уровня, несколько иначе. Юрист будет планировать ремонт автомобиля одним способом, а программист — другим, обычно более эффективным. У него есть чёткий алгоритм, он понимает, на каких этапах могут быть ошибки, умеет за ними следить. В общем, голова начинает немного по-другому работать.
— Когда упоминаешь LEGO, у детей сразу появляется высокая мотивация. Дальше её нужно не растерять, поддержать. Дети обычно хотят поиграть в LEGO. Здесь главное — не пережать, чтобы они не сбежали, поняв, что мы здесь, оказывается, не играем, а учимся. Нужно находить золотую середину, чтобы ученикам было и интересно, и полезно.
Нужно находить золотую середину, чтобы ученикам было и интересно, и полезно.
— Можно из LEGO собирать виртуальные модели. Заодно так можно познакомить детей с 3D-моделированием. 3D-программы будут сложны, а собирать 3D-модель из LEGO на экране им интересно.
О развитии LEGO-энтузиастов
— Вариации работы с оборудованием настолько велики, что этим можно заниматься много лет. Так и происходит. У нас много детей, которые выросли из этой сферы, но продолжают развиваться в направлении. Вот ты из Scratch перешёл в Python, сменил SPIKE на EV3. Дальше из EV3 можно взять более сложное решение робототехники, например, сделать металлическую основу робота, хотя контроллер и датчики будут использоваться те же самые, что и в EV3. Так можно развиваться до бесконечности.
— Хотя я давно в теме, я часто не понимаю решения, которые придумывают дети, какой они выбрали алгоритм, техническую составляющую. Можно только удивляться тому, насколько они талантливы и какую классную фишку придумали. И этот талант дальше применяется к другим задачам. Есть много примеров: ребята, которые участвовали в наших соревнованиях, потом поступали в МГТУ им. Н. Э. Баумана, оканчивали его, а сейчас владеют своим бизнесом или работают в серьёзных компаниях.
И этот талант дальше применяется к другим задачам. Есть много примеров: ребята, которые участвовали в наших соревнованиях, потом поступали в МГТУ им. Н. Э. Баумана, оканчивали его, а сейчас владеют своим бизнесом или работают в серьёзных компаниях.
— Один из типовых проектов EV3, который и к SPIKE применили, — робот-сегвей. Роботы, которые ездят на одном или двух колёсах, как велосипед, и не падают. Они держат равновесие благодаря гироскопу, встроенному в смарт-хаб SPIKE-датчика. Это отличный проект и с образовательной, и с технической точки зрения, потому что алгоритм там используется достаточно продвинутый. Нужно применить достаточно мощную математику и хорошо понимать, как устроен гироскоп. Такие проекты показывают возможности создателей и самого оборудования. Если говорить об EV3, можно бесконечно перечислять классные проекты. Например, можно поставить специальные датчики и управлять роботом или механической рукой, которая что-то хватает, силой мысли. Ты подумал, и рука что-то схватила, расслабился — она предмет отпустила.
Программирование робота-сегвея с помощью визуального языка. Источник: канал Creator Academy Australia
— Я рекомендую интересующимся вбить «суперроботы LEGO» или «проекты LEGO» на YouTube и посмотреть ролики. Особенно если вы способны оценить, какие технологии применяются. Можно увидеть конвейер, бесконечно перекатывающий шарики, или робота, который собирает кубик Рубика за 10 секунд. Так вы найдёте классные проекты, которые даже не всегда дети создают, — в этой сфере очень много увлечённых взрослых. Но изначально оборудование, с которого они начинали, предназначено для образования.
Интересно? По ссылкам в начале статьи вы сможете послушать полную версию и подписаться на обновления подкаста 😉 Оставайтесь с нами, впереди много классных выпусков!
В чем суть флешмоба с аватарками из LEGO Star Wars
Присоединяйтесь к армии!
В тиктоке (а также в инстаграме и твиттере) люди массово меняют картинки профиля на иконки персонажей игры LEGO Star Wars. Этот сложный мем похож на историю со штурмом зоны 51: кто‑то придумал абсурдный повод, а потом флешмоб начал жить своей жизнью.
Этот сложный мем похож на историю со штурмом зоны 51: кто‑то придумал абсурдный повод, а потом флешмоб начал жить своей жизнью.
Вероятно, это происходило так. Сначала кто‑то, возможно, @sambellissimo из тиктока, играл на праздниках в LEGO Star Wars и предложил ставить иконки из игры на аватарки. Потом кто‑то, возможно, @kado_xd, поддержал тикток-флешмоб, а затем кто‑то еще решил захватить иконками из LEGO Star Wars вообще весь тикток. Тогда же возникла идея зарейдить (то есть заспамить секцию комментариев) этими профилями аккаунт объединения The Hype House и показать, кто на этой платформе главный.
Подробности по теме
Интернет сошел с ума из‑за штурма зоны 51. Что вообще происходит? 👽
Интернет сошел с ума из‑за штурма зоны 51. Что вообще происходит? 👽Кто такие The Hype House
Это сообщество тиктокеров разной степени популярности, которые арендовали большое поместье в Лос-Анджелесе, чтобы вместе снимать видео. Сейчас в группу входят от 14 до 19 человек, самые известные — Авани Грегг, Lilhuddy (по 8 млн подписчиков), Эддисон Рэй (9 млн) и восходящая звезда — Чарли Д’Амелио (16 млн). Им от 15 до 20 лет. Некоторые резиденты живут в поместье, другие регулярно в нем появляются.
Сейчас в группу входят от 14 до 19 человек, самые известные — Авани Грегг, Lilhuddy (по 8 млн подписчиков), Эддисон Рэй (9 млн) и восходящая звезда — Чарли Д’Амелио (16 млн). Им от 15 до 20 лет. Некоторые резиденты живут в поместье, другие регулярно в нем появляются.
The Hype House появилось в декабре прошлого года, его придумали 17-летний Lilhuddy и 21-летний Томас Петру. Последний несколько лет назад участвовал в Team 10, похожей группе ютьюберов, которую собрал популярный блогер Джейк Пол. Все это организовано только для совместной съемки контента. Дом выбирали специально для этого: в нем много больших зеркал, мало мебели и есть просторная ванная (важный атрибут любого тиктокера). Создатели группы не берут процент за участие, но ставят условие — выпускать контент каждый день.
В чем суть рейда против The Hype House
Рейд проходил 4 января. Его суть заключалась в следующем: люди с иконками из LEGO Star Wars приходили в комментарии аккаунта The Hype House и спамили сообщениями вроде «Рейд!», «Присоединяйтесь к нам», «Сдавайтесь!», «Вам не победить». В итоге больше половины участников группировки, включая Lilhuddy и Чарли Д’Амелио, поменяли аватарки на иконки из LEGO Star Wars. Следующий рейд планируется устроить против аккаунта TikTok.
В итоге больше половины участников группировки, включая Lilhuddy и Чарли Д’Амелио, поменяли аватарки на иконки из LEGO Star Wars. Следующий рейд планируется устроить против аккаунта TikTok.
А что, к The Hype House есть претензии?
Сообщество стало локальным мемом сразу после публикации первого видео. Во-первых, оказалось, что все резиденты The Hype House это светлокожие подростки, которых иногда сложно отличить друг от друга (особенно когда они стоят в одинаковых джинсах и футболках). Во-вторых, у них получается однообразный и неинтересный контент. В основном это танцы, которые, возможно, нравятся поклонникам этих тиктокеров, но смотрятся странно на фоне куда менее популярных авторов. Это забавно, ведь ради съемок контента сообщество и задумывалось.
В итоге The Hype House воплотило буквально все стереотипы о тиктоке: красивые подростки бесконечно снимают танцы под трек «Lottery» K Camp, рассчитывают на популярность своих резидентов, а не на новые идеи, записывают неудачные липсинки и ничего другого не предлагают.
Чем закончился этот флешмоб
Сначала он стал частью шуток про Третью мировую войну, ведь теперь у интернета есть целая армия аватарок с синими кружочками, а потом, кажется, все забыли про LEGO Star Wars, поэтому теперь любую картинку профиля в тиктоке просто обводят синим кружочком.
LEGO IDEAS — Возможная модель руки человека
Здравствуйте! Это полностью сформулированная модель левой руки человека-робота. Четыре пальца имеют по три сустава, а большой палец имеет два сустава, как настоящая рука. На большом пальце даже есть несколько штифтов Technic, чтобы сделать его полностью противопоставленным. Ладонь просто твердая и плоская, в отличие от настоящей руки, но я не думаю, что это вообще ухудшает артикуляцию из-за диапазона движений пальцев и большого пальца.
Модель может быть размещена в самых разных реалистичных положениях рук, таких как сложение кулака, поднятие любого количества пальцев (показано 4), щелчок, выполнение трюка разума джедая из Звездных войн или даже удержание небольшие предметы, такие как карандаш или минифигурка (нет, они не будут включены: D).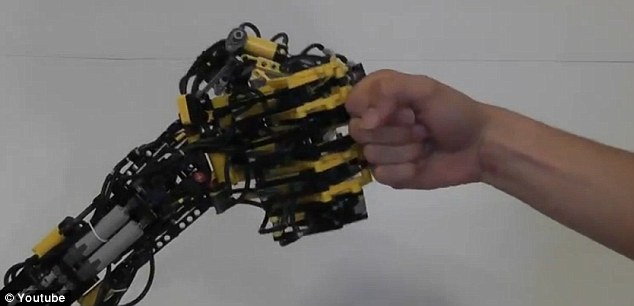 Рука прикреплена с помощью технического штифта к прочному основанию для демонстрации.
Рука прикреплена с помощью технического штифта к прочному основанию для демонстрации.
Я понимаю, что этот проект (намного) меньше, чем большинство наборов, созданных Lego Ideas, но я думаю, что он будет отличным набором по двум основным причинам: отображение и настройка.
Фотографии действительно не передают этого; артикуляция довольно впечатляющая, и с ней интересно поиграть лично, и я думаю, что эта модель будет отличным, привлекательным дополнением к любому рабочему столу. Людям понравилось бы выставлять его в разных положениях.Кроме того, приятно видеть, как работают суставы в реальной руке, с помощью интерпретации Lego одного из них.
Я использовал темно-красный и светло-серый стиль, в основном потому, что это тот цвет, который у меня был для суставов пальцев, и затем я решил продолжить его для остальной части модели. Однако это легко может быть настраиваемой функцией для набора. За исключением некоторых частей ближе к середине руки, темно-красный цвет — это все части, такие как кончики пальцев или внешние панели, прикрепленные к верхней части конструкции. Идея готового набора состоит в том, чтобы включить несколько наборов этих панелей разного цвета, чтобы люди могли изменить окончательный вид руки — темно-красный, темно-синий, серебряный и золотой … Кроме того, я сделал левую руку, потому что я Я левша, но вы могли бы просто поменять пару частей, чтобы большой палец оказался на другой стороне.
Идея готового набора состоит в том, чтобы включить несколько наборов этих панелей разного цвета, чтобы люди могли изменить окончательный вид руки — темно-красный, темно-синий, серебряный и золотой … Кроме того, я сделал левую руку, потому что я Я левша, но вы могли бы просто поменять пару частей, чтобы большой палец оказался на другой стороне.
Как отмечали другие присутствующие здесь, нажатие этой кнопки поддержки является бесплатным, поэтому, если вы хотите, чтобы на ВАШЕМ столе стояла большая красная рука Lego, нажмите на нее! Спасибо!
Lego-совместимый протез руки позволяет детям строить свои собственные руки
Дарио пробует руку с экскаватором.Карлос Артуро Торрес Протезы конечностей сделаны более или менее по образу конечности, которую они заменяют.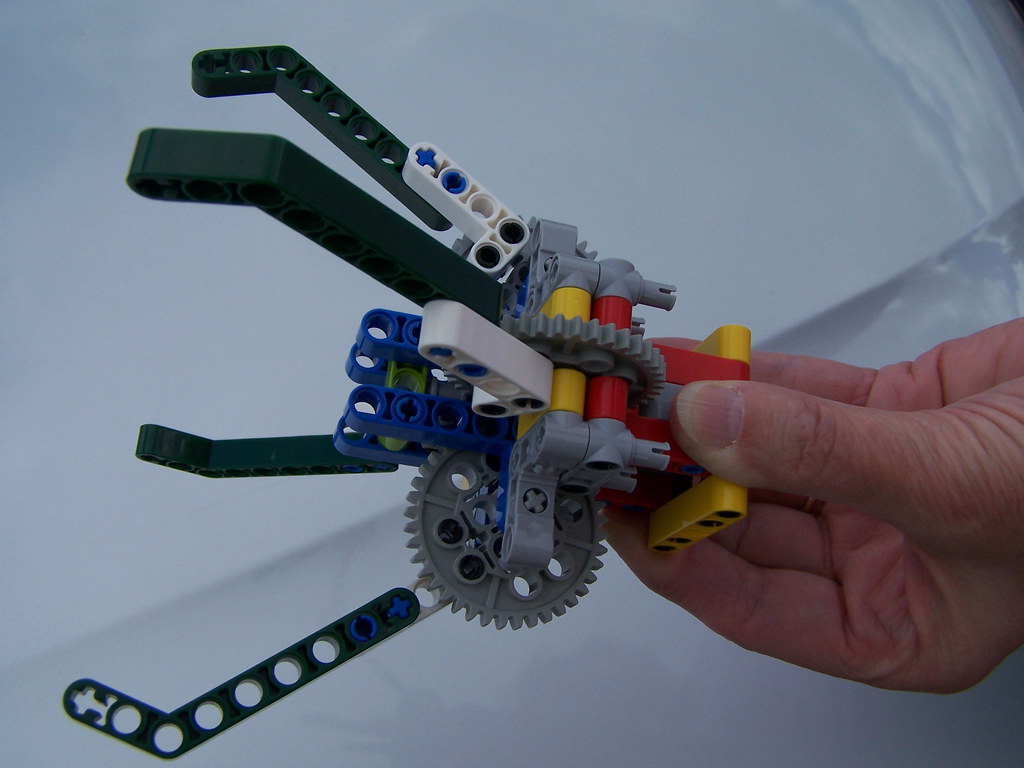 Но, как обнаружили некоторые люди, это не обязательно.
Но, как обнаружили некоторые люди, это не обязательно.
И поскольку Карлос Артуро Торрес, бывший сотрудник Института дизайна Умео в Швеции, а ныне живущий в Чикаго, хочет, чтобы мир знал, они могут сделать гораздо больше, чем просто красиво выглядеть и мигать светодиодами. Для своего последнего проекта в университете в 2014 году Торрес разработал Iko, протез для детей, который также служит платформой для творческих проектов Lego.
В начале этого месяца проект был удостоен награды «Студент открытого дизайна» на конкурсе Core77 Design Awards 2015.
«Потребности ребенка с ограниченными возможностями не всегда связаны с физической активностью, но часто альтернативно социальным и психологическим аспектам; иногда функциональный элемент — это все, что им нужно, но иногда это может быть космический корабль или кукольный дом, или телескоп, или контроллер видеоигры, или плавательный плавник, — пояснил Торрес на странице проекта на Core77.«Что, если бы дети могли использовать свое воображение для создания своих собственных протезов, своих собственных инструментов в соответствии с их собственными потребностями? Учиться. Создавать. Быть детьми».
Создавать. Быть детьми».
Рука была создана в сотрудничестве с Lego Future Lab, группой исследований и разработок компании, производящей игрушки, и CIREC, фондом физической реабилитации. У него есть съемная роботизированная рука с шарниром, которая делает Iko полностью функциональным протезом. Это контролируется с помощью миоэлектрических датчиков, которые считывают электрические сигналы, проходящие по мышцам пользователя.
Рука также является полностью функциональным роботизированным протезом. Карлос Артуро Торрес В середине протеза находится процессор и двигатель, совместимые с Lego Mindstorms, роботизированной линией игрушечной компании. На внешней стороне руки есть несколько трубок Lego, к которым можно прикрепить детали Lego, и трубка также помещается на кончике каждого пальца. Это означает, что владельцы не только могут создавать крутые вещи из Lego — они могут создавать крутые роботы из Lego.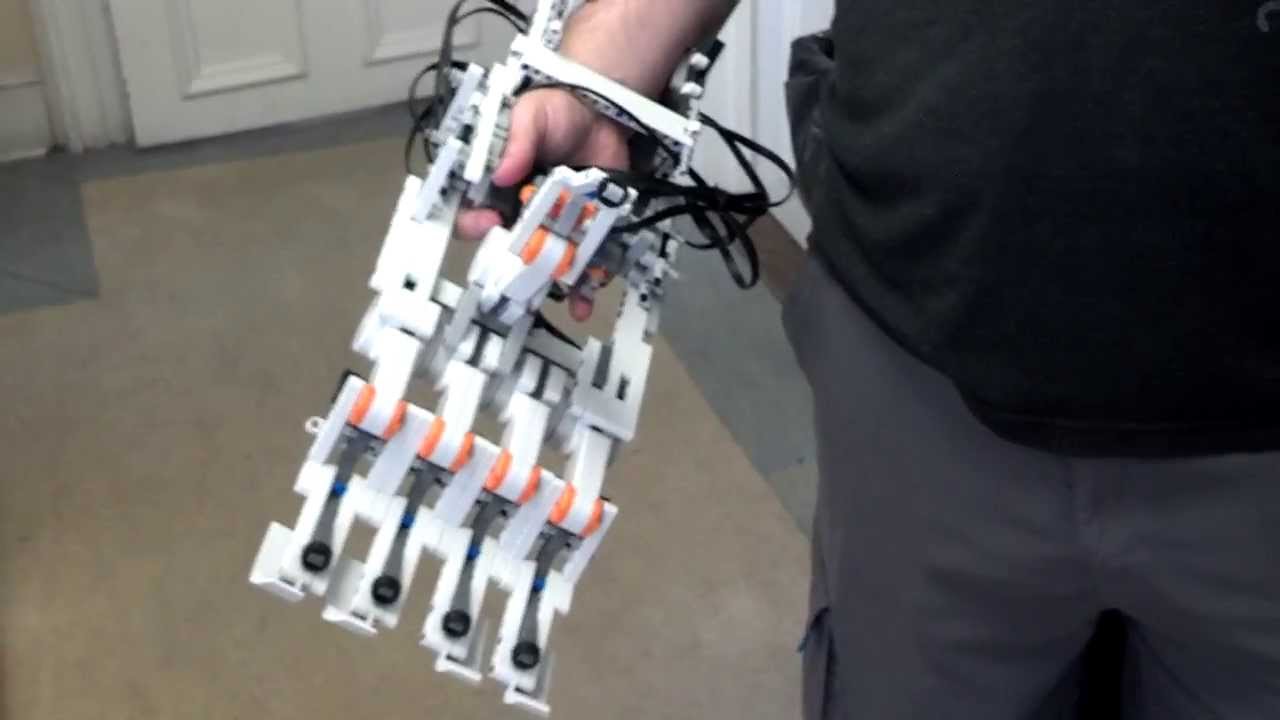
Прототип был протестирован мальчиком по имени Дарио, который мог управлять экскаватором Lego, светодиодом на космическом корабле и захватами Lego, прикрепленными к его руке с помощью миоэлектрических датчиков.
Iko был разработан таким образом, чтобы дети могли сотрудничать и связываться друг с другом, а не чувствовать себя изолированными и разными из-за протеза.
«Было много проблем, которые я пытался понять: плохое восприятие детей в отношении протезирования, глубокий акцент компаний на инженерии, а не на человеческую часть ребенка с ограниченными возможностями, социальная изоляция ребенка из-за его состояние и насколько сложно им развить высокую самооценку, — сказал Торрес.
«Моя идея заключалась не в том, чтобы сделать традиционный протез, а в том, чтобы предложить систему, которая была бы достаточно гибкой, чтобы дети могли использовать, взламывать и творить сами и со своими друзьями».
 youtube.com/embed/e0ne-XfXtnQ»/>
youtube.com/embed/e0ne-XfXtnQ»/>
Запуск LEGO с проектом строительства катапульты LEGO
Всегда прямо перед сном, когда мой сын просит построить что-то вроде «катапульты замка» из LEGO®.Отлично, подумал я, но пора спать! Что вы знаете, на следующее утро ярким и ранним утром он был готов сделать его. Мы построили потрясающую катапульту LEGO , используя простые кубики для простой физики и физики. Это забавная самодельная катапульта, которую каждый захочет сделать! Мы любим крутые занятия LEGO, состоящие из простых кубиков LEGO®.
КАК СДЕЛАТЬ КАТАПУЛЬТУ ДЛЯ ДЕТЕЙ из LEGO!
ПРОСТЫЕ КАТАПУЛЬТЫ ДЛЯ ДЕТЕЙ
Разве задания LEGO для детей не были бы лучше со специальными деталями, которые делали то и то то? Может быть, но тогда это не обязательно будет легко, или его не сможет собрать большинство детей с меньшей коллекцией LEGO®!
ВАМ ТАКЖЕ МОЖЕТ ПОНРАВИТЬСЯ: Popsicle Stick Catapult
Моему сыну 6 лет, и он все еще изучает тонкости работы с различными конструкциями LEGO®.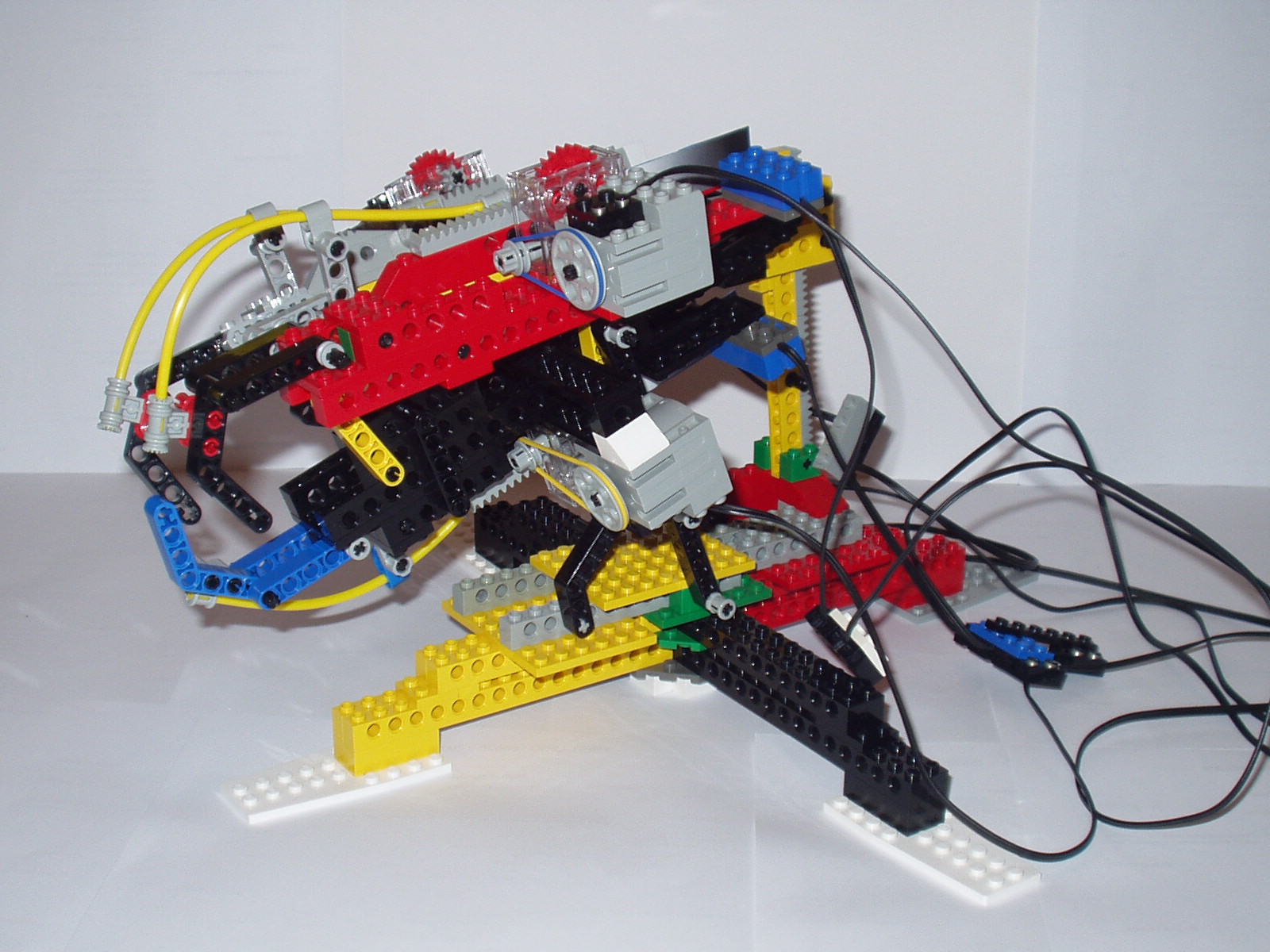 Я не хотел строить для него всю эту катапульту. Вместо этого я предпочитаю помогать ему устранять его идеи.
Я не хотел строить для него всю эту катапульту. Вместо этого я предпочитаю помогать ему устранять его идеи.
Я люблю задавать вопросы, чтобы помочь ему, когда он застрял. Иногда это так же просто, как вернуть ему вопрос, чтобы помочь ему найти собственное решение. Это отличная практика STEM!
Ищете удобные для печати задания и недорогие решения проблем?
Мы вам поможем…
Нажмите ниже, чтобы быстро и легко решить проблему строительства кирпича.
КАК СДЕЛАТЬ КАТАПУЛЬТУ из LEGOСоздание любого творения с помощью LEGO® — это немного метод проб и ошибок, что на самом деле делает его еще более увлекательным. Что бы мы узнали, если бы с первого раза все работало идеально? Немного.
У вас могут быть кубики одинаковой или разной длины и размера, но вы можете использовать нашу идею создания этой простой катапульты LEGO, чтобы начать работу. Может быть, вы даже придумаете лучший дизайн катапульты LEGO и поделитесь им с нами.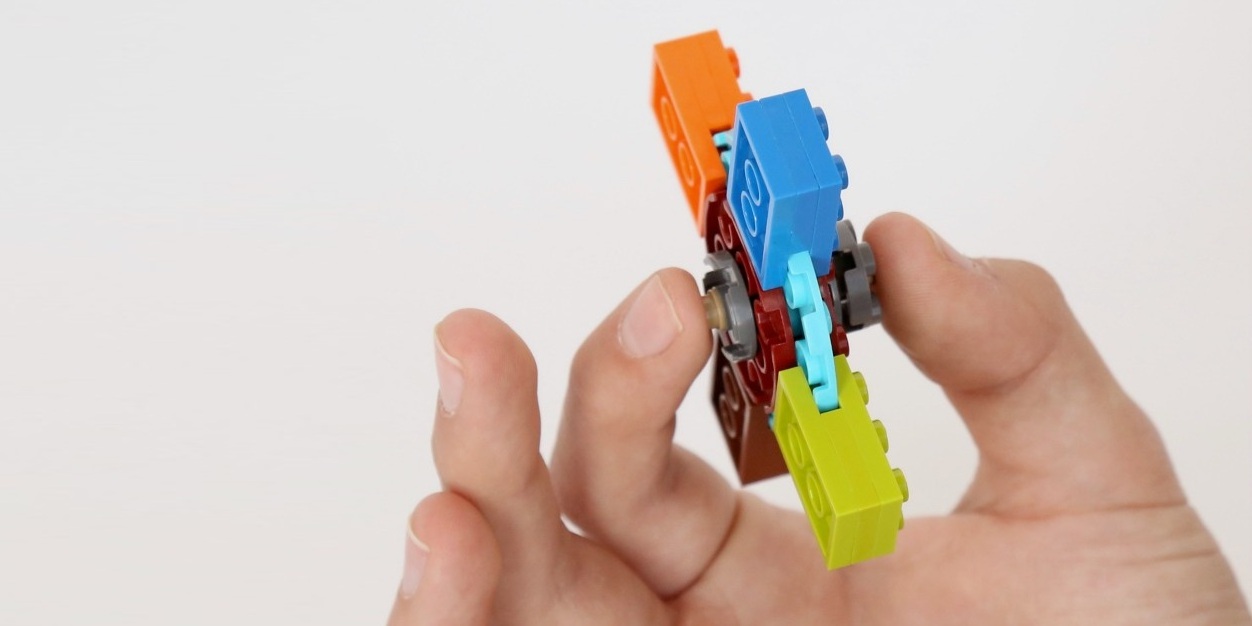
ВАМ НУЖНО:
1. БАЗА КАТАПУЛЬТЫ LEGO- Большая опорная плита любого цвета
- Маленькая пластина длиной 20 шпилек и шириной не менее 10 {или как можно ближе к вам!}
- 2 × 2, 2 × 4 кирпича
- 1 × 2, 1 × 4, 1 × 6 кирпичей
- Резинки (у нас под рукой были только эти большие, но вы можете попробовать и другие размеры)
- Пластина 4 × 4 для части, которая удерживает зефир, окруженная кирпичами 1 × 2 для изготовления держателя
- (2) 2х12 лыски для рычага
- (2) 2 × 8 кирпичей
- 2 × 2 кирпич
В любой момент вы можете попытаться изменить эту катапульту LEGO, чтобы она соответствовала имеющимся у вас кубикам.Например, у вас может быть (2) кирпичей 1 × 8, которые вы можете заменить на кирпичи 2 × 8. Посмотрите, работает ли это! Будьте изобретательны!
КАК СОЗДАТЬ КАТАПУЛЬТУ LEGO
Мы сделали одну широкую стену из 1 × 4 и 1 × 6 кирпичей через небольшую тарелку и прикрепили его к опорной плите.
Затем мы добавили опоры спереди и сзади с помощью кирпичей двойной ширины. Обратите внимание, что мы оставили зазор в 4 гвоздика посередине. Большая часть основания состоит из трех высоких кирпичей, а затем на верхнюю часть каждой стороны был добавлен один дополнительный слой из кирпичей 1 × 8, при этом середина оставалась чистой.
ВАМ ТАКЖЕ МОЖЕТ ПОНРАВИТЬСЯ: Simple LEGO® Zip Line
Оцените нашу программу запуска, чтобы сделать свою собственную. Красные кирпичи 2 × 8.
Часть ковша находится заподлицо с концом красного кирпича. Под ним нет белой пластины.
Кирпич 2 × 2 используется для удержания резиновых лент на месте. Здесь вы начинаете экспериментировать с натяжением с помощью катапульты LEGO.
ВАМ ТАКЖЕ МОЖЕТ ПОНРАВИТЬСЯ: Автомобиль на резинке LEGO®
Изначально мы обернули резиновыми лентами всю основу, но поняли, что нам нужно больше натяжения, так как ленты были довольно большими. Мы добавили дополнительный ряд с каждой стороны (5) кирпичей 2×3 высотой.
Мы добавили дополнительный ряд с каждой стороны (5) кирпичей 2×3 высотой.
Кошке тоже понравилось. Это развлекало ее так же.
Нажмите ниже, чтобы быстро и легко решить проблему строительства кирпича.
ПРОВЕРЬТЕ НАТЯЖЕНИЕ LEGO CATAPULT
Хотя он определенно запустил нашу конфету, он не зашел так далеко, как нам хотелось бы. Нам нужно было больше напряжения.Мы попытались добавить еще одну строку рядом с только что добавленной строкой, но это не дало необходимого напряжения (не показано). Убедитесь, что резинки находятся под кирпичом 2 × 2, а не над ним (не так, как показано ниже!}
ВАМ ТАКЖЕ МОЖЕТ ПОНРАВИТСЯ: LEGO® Машинки-шары
Итак, мы пошли дальше и добавили кирпичи к начальным столбцам, которые мы добавили сбоку от пластины (как показано выше). Решили выровнять тарелкой. Ой, слишком много напряжения! Посмотри, что случилось! Рычаг рычага тоже вылетел!
Мы попробовали несколько вариантов кирпичей, прежде чем нашли идеальное натяжение для нашей легкой катапульты LEGO (у вас она может быть другой!} В итоге нам пришлось оставить свободными по одной шпильке с каждой стороны колонны.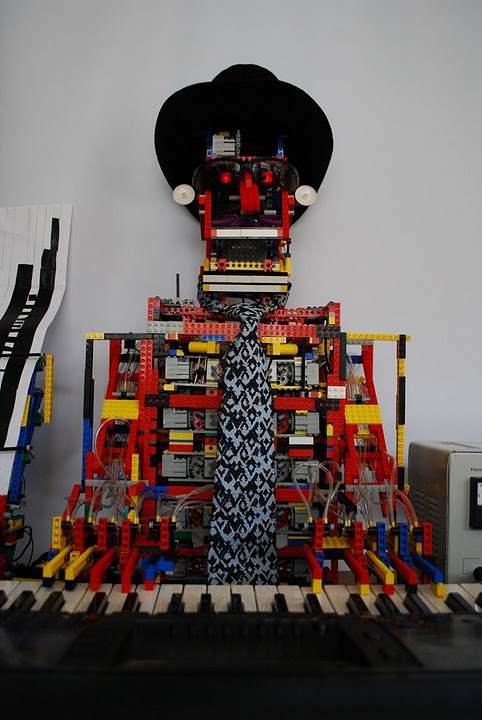
ВАМ ТАКЖЕ МОЖЕТ ПОНРАВИТЬСЯ: LEGO® Coding for Kids
Вот и все! Классный эксперимент по науке о натяжении в дополнение к потрясающему заданию по сборке LEGO®!
СОЗДАЙТЕ КАТАПУЛЬТУ LEGO, КОТОРУЮ МОЖНО СДЕЛАТЬ С ДЕТЯМИ!
Щелкните изображение ниже или ссылку, чтобы увидеть другие интересные задания LEGO для детей.
Ищете удобные для печати задания и недорогие решения проблем?
Мы вам поможем…
Нажмите ниже, чтобы получить быстрые и простые задания по STEM.
Более 100 строительных проектов Lego для детей
Вот коллекция потрясающих строительных идей LEGO, которые вдохновят любого поклонника LEGO®! В этом посте более 100 задач и инструкций по построению кирпича. Стройте персонажей, животных, машины и многое другое.
Мы любим кубики LEGO® за бесконечное веселье и воображение, которые они вдохновляют! Конструктор LEGO® дает так много преимуществ, как зрительно-моторная координация, логика, творческий подход и решение проблем.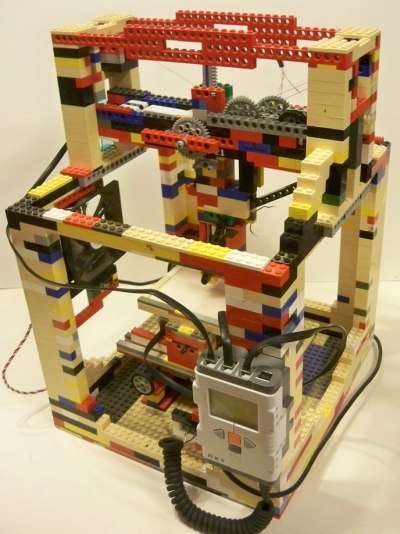
Этот пост был обновлен 10 сентября 2019 г.
Вот как работает этот пост. Этот пост представляет собой собрание идей по сборке LEGO, собранных в одном месте, но для каждой из них есть отдельная запись в блоге. Просмотрите каждый проект более подробно, нажав на ссылки ниже.
LEGO® Machines and STEM Learning:
Создайте сейф LEGO Lock & Key — два способа собрать маленькую коробочку LEGO, которая действительно открывается с помощью ключа! Инструкции в посте.
Постройте автомобиль LEGO, приводимый в движение воздушным шаром. Постройте автомобиль, который движется вперед с помощью воздуха, вылетающего из воздушного шара. Отличный научный проект! Это демонстрирует 3-й закон движения Ньютона.
Постройте катапульту LEGO (чтобы стрелять этими маленькими пластмассовыми шариками LEGO или чем-то подобным). Инструкции в посте.
Конструирование с помощью LEGO и воды — Постройте реку с проточной водой и работающим водяным колесом. Отлично подходит для месяцев теплой погоды. (И в то же время он очищает ваш LEGO — ха-ха!)
Отлично подходит для месяцев теплой погоды. (И в то же время он очищает ваш LEGO — ха-ха!)
Автомобиль LEGO с ракетным двигателем — Этот автомобиль приводится в действие реакцией Алки Зельцера внутри пластиковой бутылки.
Автомобиль LEGO с приводом от резиновой ленты — Постройте автомобиль, который приводится в движение резиновой лентой, которую можно заводить. Инструкции в посте.
LEGO Marble Run — эта мраморная трасса поистине эпична! В этом посте детям показано, как построить действительно изящные элементы на своей мраморной дорожке, а также есть демонстрация видео.
LEGO Spinning Tops — дети будут заняты этим часами. Идеально подходит для группы, так как детям понравится заставлять свои вершины «сражаться» друг с другом!
Узнайте о простых машинах со шкивами LEGO. Этот проект позволит детям понять и почувствовать механическое преимущество, которое обеспечивают шкивы.
Создание конструкции LEGO, работающей от ветра — это было любимое занятие! Используйте электрический вентилятор, чтобы приводить в движение свои творения LEGO.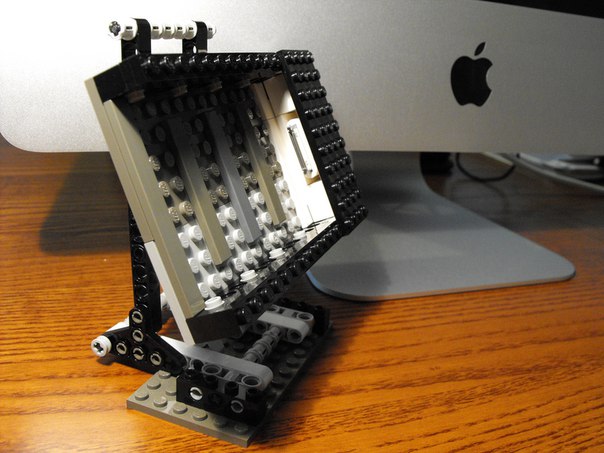
LEGO Bridge Building Challenge
LEGO Demolition Derby — веселье!
Создайте весы LEGO и сравните вес предметов.
LEGO® Вокруг дома
Сделайте фоторамку LEGO — используйте кубики, чтобы построить сообщение на этой забавной рамке! Просто начните с деревянного каркаса. В посте есть все подробности!
Создайте ночные светильники LEGO — они действительно загораются! Используйте чайные свечи с батарейным питанием, чтобы сделать это безопасно и весело.
Настольный органайзер LEGO — с зарядной станцией!
Держатели для кабелей Minifigure — для зарядного устройства телефона и т. Д. Это так весело!
Создайте дозатор конфет LEGO — эта машина действительно распределяет небольшое количество M&M! Один из самых популярных наших проектов.
Вот еще один способ построить конфетную машину LEGO — он выдает звездообразования по одному с помощью хитроумного механизма.
Собери картхолдер LEGO — чтобы помочь маленьким детям играть в карточные игры. Мне нравится эта идея из книги «Мама с планом урока».
Мне нравится эта идея из книги «Мама с планом урока».
Сделайте мозаичное письмо LEGO — развлечение для комнаты любого фаната LEGO!
Собери и играй с LEGO®
Сделай несколько накидок LEGO из клейкой ленты — идеально подходит для замены отсутствующих накидок или добавления аксессуаров к любой минифигурке!
Stained Glass LEGO Challenge — это одно из моих любимых строительных заданий! Так красиво.
Как собрать единорога LEGO — так причудливо и весело! Инструкции в публикации, а также список запчастей!
Как собрать LEGO Yoda
Как собрать LEGO C3PO и R2-D2
Картинки LEGO — Из детства 101.Люблю их!
Как собрать LEGO Dogs — Собака типа гончая и вести
Еще LEGO Dogs — Такса и мастиф
Как собрать LEGO Pandas — Панды — одни из моих любимых животных!
Как собрать котиков LEGO — создавайте очаровательных котиков! Инструкции в посте.
Сделайте зиплайн LEGO — из мусорных ведер для маленьких рук
Постройте гоночную трассу LEGO для автомобилей Hot Wheels — отпустите все машины сразу!
Как собрать миньонов из LEGO — еще один фаворит! С инструкциями в посте.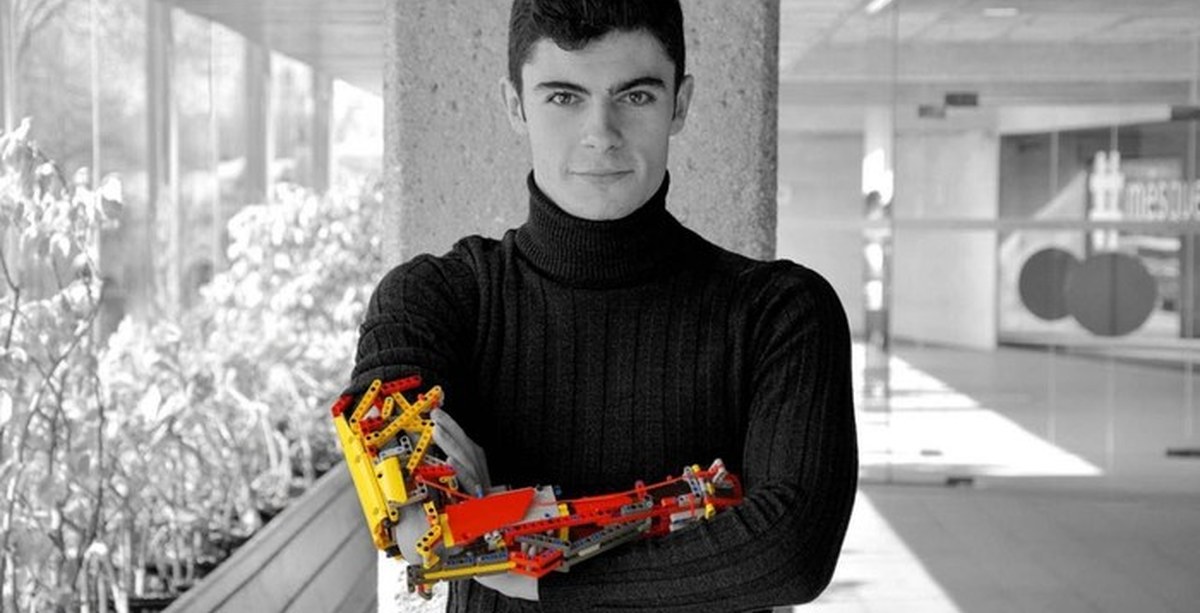
LEGO Photography — Создавайте веселые или драматические сцены с мини-фигурками, а затем фотографируйте!
LEGO Hearts — из коробочек для маленьких ручек
В духе Big Hero 6! Инструкции по сборке LEGO Baymax
На основе «Как приручить дракона» — Инструкции по сборке беззубика (Ночная ярость)
и Hookfang (чудовищный кошмар)20 проектов LEGO для начинающих — столько забавных идей по сборке LEGO®! Соберите барабанную установку, фортепиано, лам, транспортные средства и многое другое.
17 проектов LEGO для начинающих. Во всех этих проектах используются детали из набора для творчества LEGO® Classic.
20 простых проектов LEGO — Во всех этих проектах используются детали из малых и средних ванн LEGO® Classic, так что это отличный способ начать работу с LEGO®! (Ссылки на ванны в сообщении.)
Постройте жизненный цикл бабочки-монарха с помощью LEGO
Постройте дорожку LEGO для Hexbugs — Любимое!
LEGO Ice Excavations от Lemon Lime Adventures
LEGO Nerf Targets — Объедините две любимые игрушки в этом веселом строительном испытании!
LEGO® Games
LEGO Party Games — это отличная коллекция реалистичных (не чрезмерных Pinterest) идей.
LEGO Family Fun Night от Not Consumed — простые игры!
Настольная игра LEGO для печати от мамы с планом урока
Крестики-нолики LEGO из блога «Детские развлечения». Превратите его в комплект, положив все детали в сумку!
Создайте настольную игру из LEGO. Создайте свою собственную настольную игру с помощью рабочего игрового прядильщика. Это идеальный проект для дождливого дня!
Собери шахматный набор LEGO — это действительно круто!
Создайте игру LEGO Skittles из мусорных ведер для маленьких рук
LEGO Timed Building Challenges — как Pictionary, но с LEGO®!
Идеи сборки LEGO® для праздников и времен года
Собирайте цыплят, кроликов и бабочек LEGO — очаровательные весенние проекты, которые несложно построить.
7 идей для охоты за пасхальными яйцами LEGO. Это потрясающие идеи для охоты за пасхальными яйцами, особенно если вы хотите, чтобы в них не было конфет.
Весенние проекты LEGO по сборке
Осеннее дерево LEGO Wall Art
Как построить снежинки LEGO — существует так много способов сделать их, и конструкции такие красивые. Идеальная строительная задача для группы.
Идеальная строительная задача для группы.
Рождественские проекты LEGO –
У нас ТАКОЕ много идей новогодних сборок LEGO! Вы можете найти большинство из них здесь, а также версию для печати: LEGO Christmas Ideas
Пять рождественских проектов LEGO — с инструкциями по сборке
Это мой ЛЮБИМЫЙ обратный отсчет до Рождества — создайте рождественский календарь LEGO с открывающимися дверями.
Три способа сделать рождественский календарь LEGO — это было ТАК весело и могло стать традицией в нашем доме!
Хранение и организация LEGO®
Минифигурка из деревянного ящика DIY
Это наш стол LEGO®, и нам он нравится! Все подробности можно найти здесь — IKEA Storage LEGO Table.
Доступная LEGO-организация из коробочек для маленьких ручек
Дешевое и легкое хранение LEGO от счастья — это самоделка. Мне нравятся эти урны!
37 идей для хранения Genius LEGO из блога Kids Activity Blog.
Магнитный дисплей минифигурок — мне нравится эта идея! Фигурки — это магниты, но их также можно снять и поиграть с ними в любое время.
WHEW! Это много идей LEGO®!
Также обязательно ознакомьтесь с нашей книгой LEGO® — «Потрясающие творения LEGO с кубиками, которые у вас уже есть» . Эта книга станет прекрасным подарком на Рождество или день рождения, и это отличная цена для детей, чтобы подарить их на день рождения. В книге 50 новых проектов со списками запчастей и пошаговыми инструкциями.
LEGO® является товарным знаком группы компаний LEGO®, которая не является спонсором. разрешить или поддержать этот сайт.
Библиотека для раздачи наборов LEGO в субботу на мероприятии для автомобилей | Новости, Спорт, Работа
представленная фотография Наборы Lego будут раздавать в субботу в публичной библиотеке Майнота.
Публичная библиотека Майнота пытается обеспечить онлайн-развлечения для детей даже во время продолжающейся пандемии коронавируса.
Три раза в неделю для самых маленьких посетителей библиотеки проходят виртуальные часы рассказов с пакетами заданий, которые можно забрать в библиотеке, чтобы дети могли сделать что-нибудь, связанное с часом рассказа.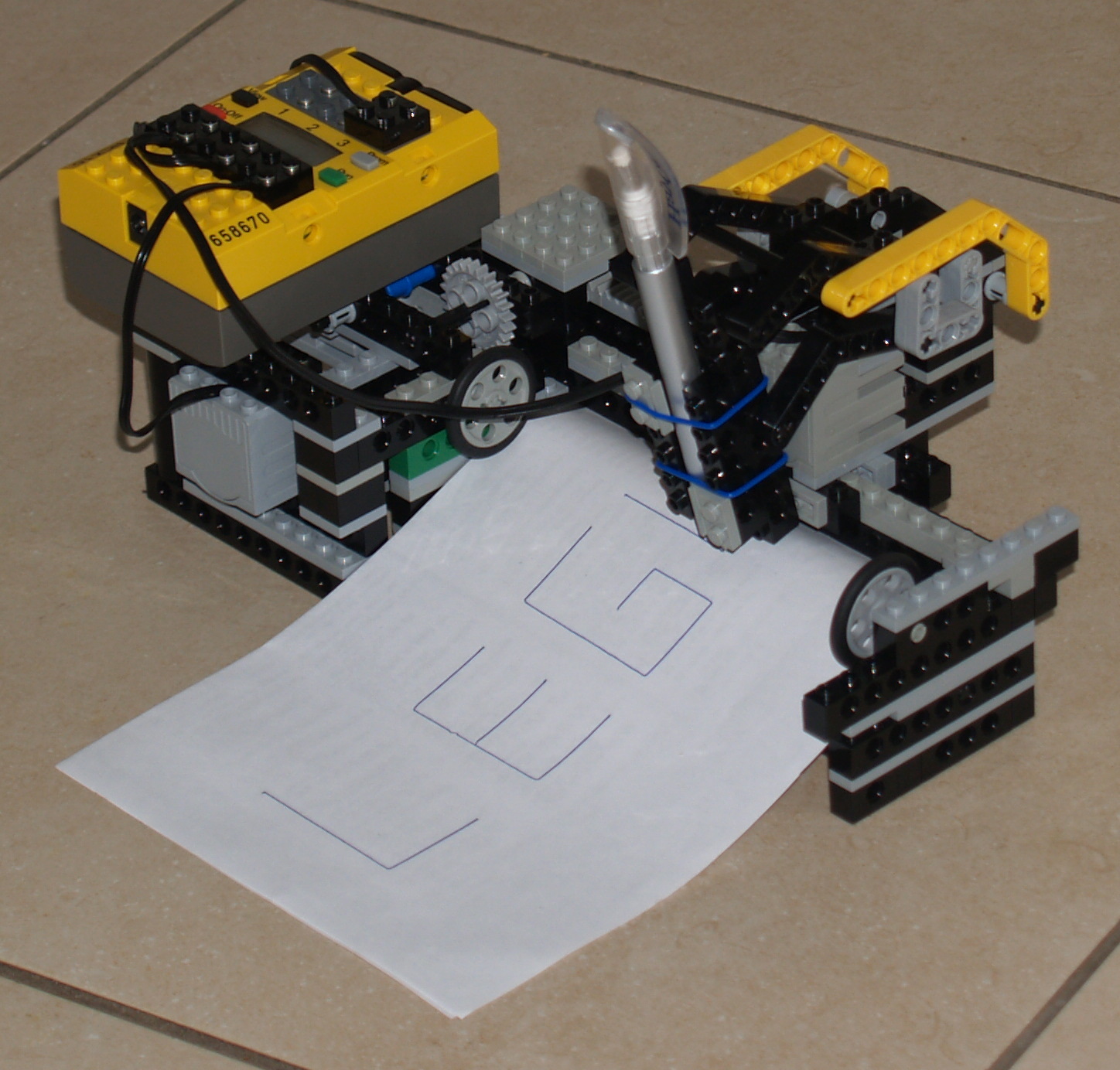 Для детей постарше есть виртуальный лагерь STEAM, где все необходимое для занятий находится в большой сумке под ящиком библиотеки. Есть также регулярные мероприятия для детей старшего возраста и взрослых.
Для детей постарше есть виртуальный лагерь STEAM, где все необходимое для занятий находится в большой сумке под ящиком библиотеки. Есть также регулярные мероприятия для детей старшего возраста и взрослых.
Последнее мероприятие — это мероприятие «Захват и LEGO», которое состоится в субботу.Эта программа частично финансируется Humanities North Dakota, некоммерческой независимой государственной организацией, партнером Национального фонда гуманитарных наук. Библиотекарь Джанет Андерсон сообщила, что будет роздано более 200 бесплатных наборов LEGO.
Родители могут зайти на парковку библиотеки у восточного входа в 13:00. В субботу сотрудники библиотеки будут снаружи и будут раздавать наборы у тротуара. Чтобы получить комплект, в машине должен находиться ребенок до 15 лет.
«Обычно мы проводим клуб LEGO во второй вторник каждого месяца, и некоторые дети начинают нервничать и хотят, чтобы их клуб LEGO вернулся, поэтому мы подумали, что это будет хорошим компромиссом», — сказал Монли.
Монли сказал, что детям рекомендуется публиковать фотографии творений, которые они создают с помощью своего набора LEGO, на странице библиотеки в Facebook или Instagram. Каждый, кто отметит публичную библиотеку Майнота на изображении в Instagram или разместит изображение на мероприятии Grab & LEGO в Facebook, получит приз. Победителям будет отправлено сообщение через используемую платформу социальных сетей. Случайно выбранный победитель получит большой набор Lego, рюкзак, коробку для завтрака, пенал, шнурок и книгу Lego, чтобы он мог проверить все свои навыки Lego.
Последние новости сегодня и многое другое в вашем почтовом ящике
Lego для взрослых: компания нацелена на взрослых, находящихся в стрессе.
«Забавно отключиться и следовать чужим инструкциям», — говорит Бриггс, учитель математики в Олимпийском колледже недалеко от Сиэтла. «Только когда я стал старше — и получил работу и больше денег — я увидел в этом ценность».
Lego, крупнейший и самый прибыльный производитель игрушек в мире, ориентируется на растущую аудиторию: взрослых, находящихся в стрессовом состоянии.87-летняя датская компания все чаще заявляет о своих ярких кирпичах как о способе заглушить дневной шум и, возможно, достичь определенной степени внимательности. Новейшие комплекты компании, которые включают кафе Central Perk из ситкома «Друзья» и винтажный Бэтмобиль 1989 года, отражают ностальгию поколения X, в то время как его линии Ideas и Forma нацелены на взрослых, которые хотят занять свои руки, но не теряют мысли. слабо вовлечен.
Взрослые стали желанным рынком для производителей игрушек, столкнувшись с возросшей конкуренцией и снижением роста продаж, и не повредит, что они с большей вероятностью потратят 800 долларов на набор «Сокол тысячелетия» из 7541 предмета или 400 долларов на замок Гарри Поттера Хогвартс. , который входит в список желаний Бриггса.
«Взрослые, выполняющие тяжелую работу, говорят нам, что используют Lego, чтобы отвлечься от повседневной мании», — сказала Женевьева Капа Круз, стратег по маркетингу аудитории Lego.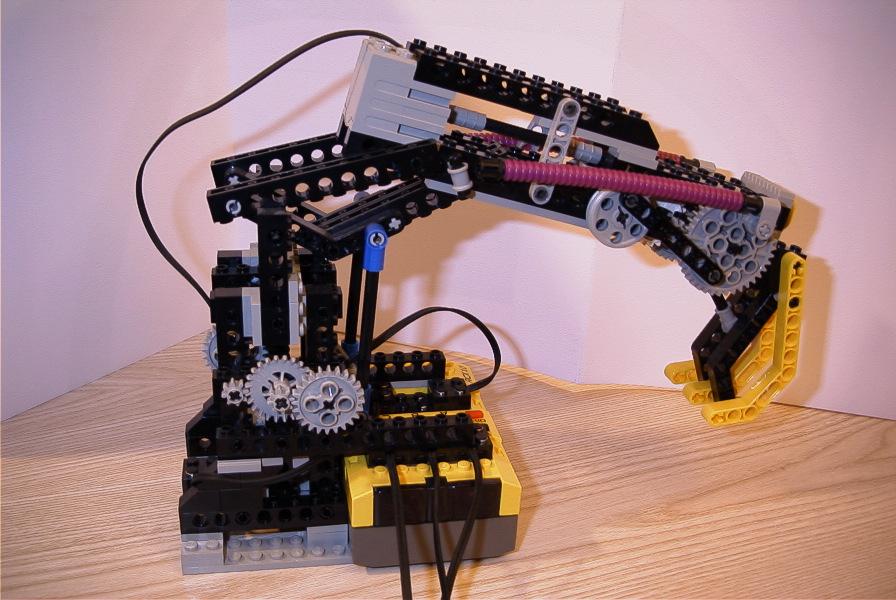 «Они ищут расслабляющего, успокаивающего опыта — и им нравятся инструкции, потому что это то, что помогает им быть в зоне».
«Они ищут расслабляющего, успокаивающего опыта — и им нравятся инструкции, потому что это то, что помогает им быть в зоне».
Компания потратила последние пять лет на обновление инструкций, чтобы сделать наборы надежными для измученных взрослых, сказала она. В прошлом году компания Lego представила серию моделей рыбок кои и акул с успокаивающими движениями, чтобы привлечь внимание строителей, ищущих «радостных творческих задач».«
Lego, конечно же, привлекает внимание многих поколений. Взрослые фанаты Lego, известные в просторечии как AFOL, вдохновили десятки групп в Facebook и Reddit и по крайней мере один «блочный фильм». Новая книга направлена на то, чтобы научить пожилых строителей использовать кирпичи в качестве средства снятия напряжения, а не для создания сложных моделей, а просто для получения удовольствия от процесса. А конкурсное шоу «Мастера LEGO», премьера которого состоится в следующем месяце на телеканале Fox, собирает взрослых строителей друг против друга.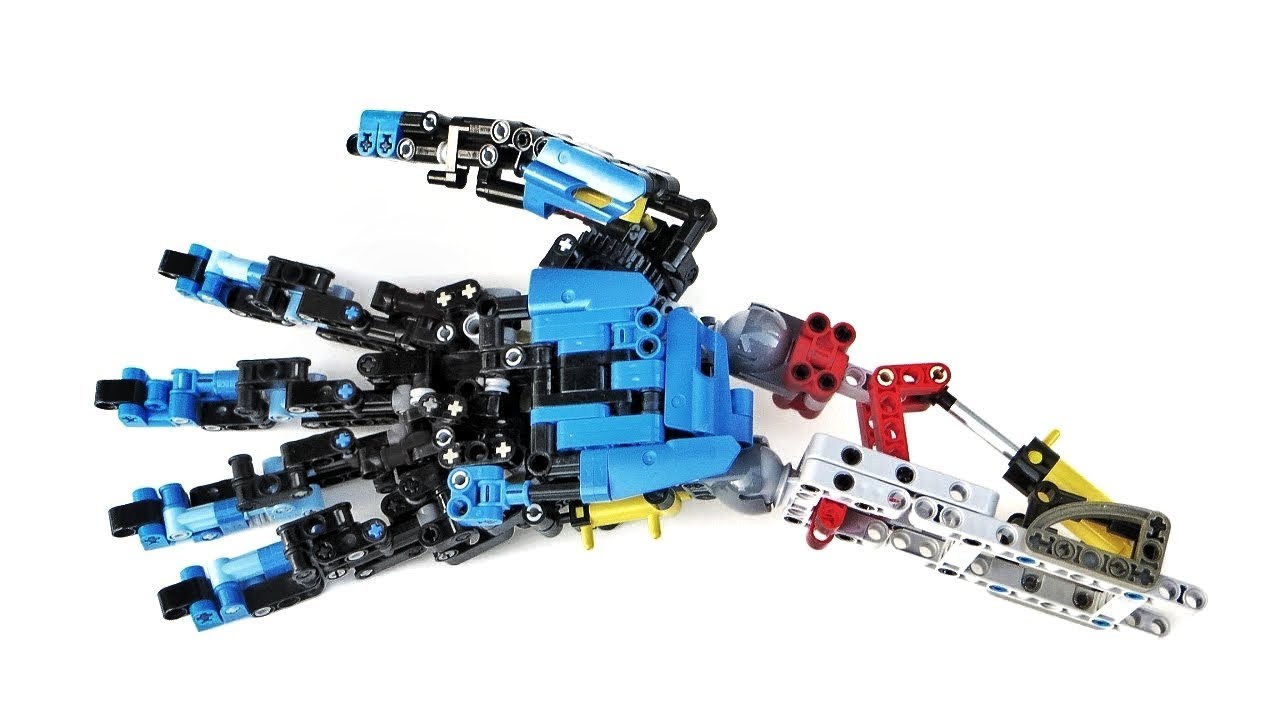 (Вспомните «The Great British Bake Off» для Lego.)
(Вспомните «The Great British Bake Off» для Lego.)
Игрушечный гигант все больше и больше смотрит не только на заядлых любителей, чтобы ухаживать за случайным строителем в поисках современного спокойствия. «Нужен побег?» — спрашивает недавняя реклама Lego в Instagram. «Строительство из кубиков Lego снижает стресс и улучшает ваше самочувствие. Это дзен, в форме кирпича.
Осознанность — это медитативная практика, уходящая корнями в древний буддизм и индуизм, которая фокусируется на настоящем, не зацикливаясь на прошлом и не беспокоясь о будущем. Было показано, что он снимает стресс и беспокойство, улучшает сон и даже снижает кровяное давление.В последние годы осознанность стала широко распространенным модным словом: такие корпорации, как Apple, Nike и HBO, добавляют комнаты для медитации для сотрудников, а такие приложения, как Headspace и Calm, обещают помочь массам обрести покой. Компания Lego не единственная, кто использует ее в качестве торгового аргумента: компании теперь предлагают семинары по «осознанному вязанию», а растущий список книг обещает внимательность через раскрашивание, кроссворды и рукоделие.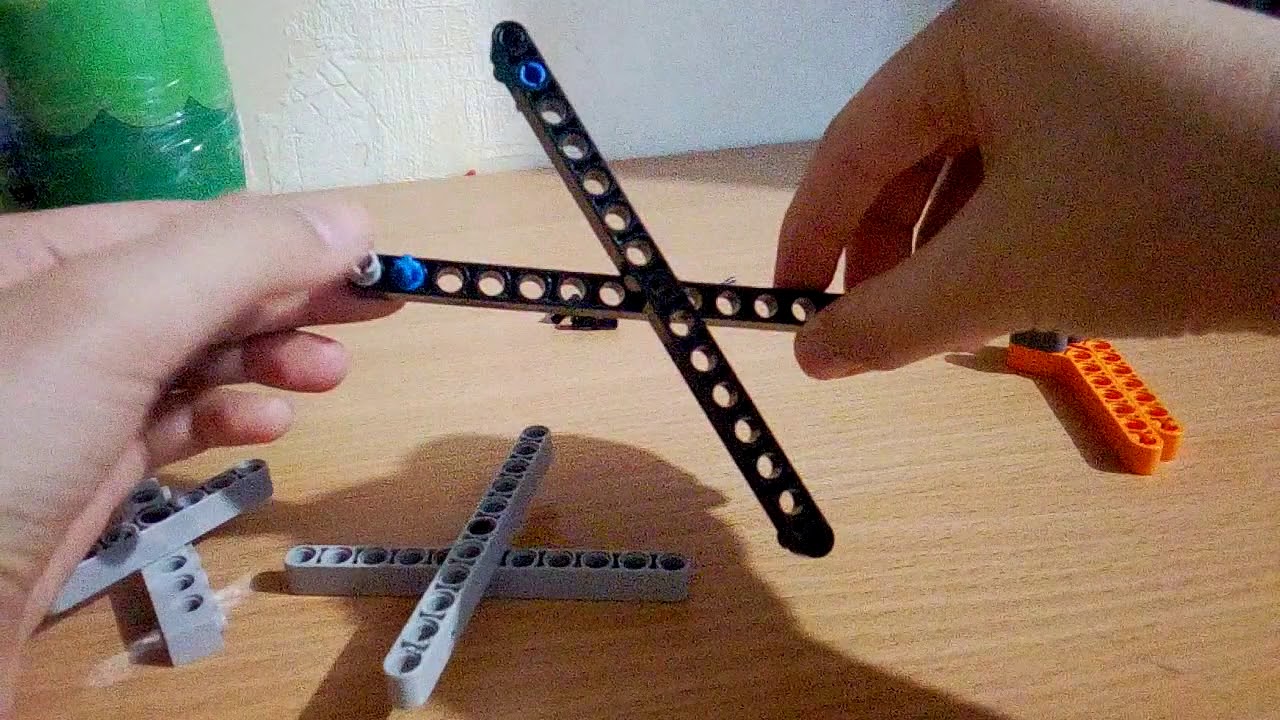
Любое повторяющееся действие — вышивание, подметание или, да, соединение кубиков Lego — может помочь найти правильный баланс между умственной активностью и расслаблением, — сказала Кэрри Бэррон, директор программы Creativity for Resilience в Техасском университете в Dell Medical в Остине. Школа.«Сосредоточиться на задаче — это форма внимательности».
Буклеты с инструкциями Lego, добавила она, тоже играют важную роль: «Нам нравится иметь структуру и четкий путь. Идея о том, что «если вы последуете этому, вы добьетесь этого», очень привлекательна ».
«Дело в том, чтобы освободить свой разум»
Эбби Хедон не прикасалась к Lego в течение добрых 20 лет, когда датский игрушечный гигант позвонил с заданием: написать книгу для находящихся в стрессе взрослых, таких как она, которые не играли с блоками десятилетиями.Она купила небольшой пакет с кусочками и принялась за работу.
«Смысл в том, чтобы освободить ваш ум от других отвлекающих факторов и сосредоточиться на игре, даже если у вас всего несколько фигур», — сказал 44-летний Хедон, живущий в Англии.
Ее 160-страничная книга «Построй себя счастливым: радость игры с Lego Play» была выпущена в США в прошлом месяце. Такие главы, как «Будь снова ребенком» и «Строения, которые помогут тебе уснуть», побуждают взрослых играть по-новому: строить что-нибудь с закрытыми глазами. Создайте радугу.Постройте самую высокую башню, какую сможете. Есть также практические соображения: в главе «Изменяющее жизнь волшебство уборки ваших кубиков Lego» предлагаются предложения по сортировке и хранению.
«Самое интересное не только в том, что я собираюсь построить это, и оно будет идеальным», — сказал Хедон. «Это одна из замечательных особенностей Lego: нет риска. Вы всегда можете просто разобрать его и начать заново ».
Сейчас Хедон хранит на столе картонную коробку с деталями Lego. По ее словам, они обладают терапевтическим действием, даже если она не играет с ними активно.
«Мне нравится держать что-то в руке, когда я думаю, поэтому я беру несколько деталей Lego и складываю их вместе и врозь», — сказала она.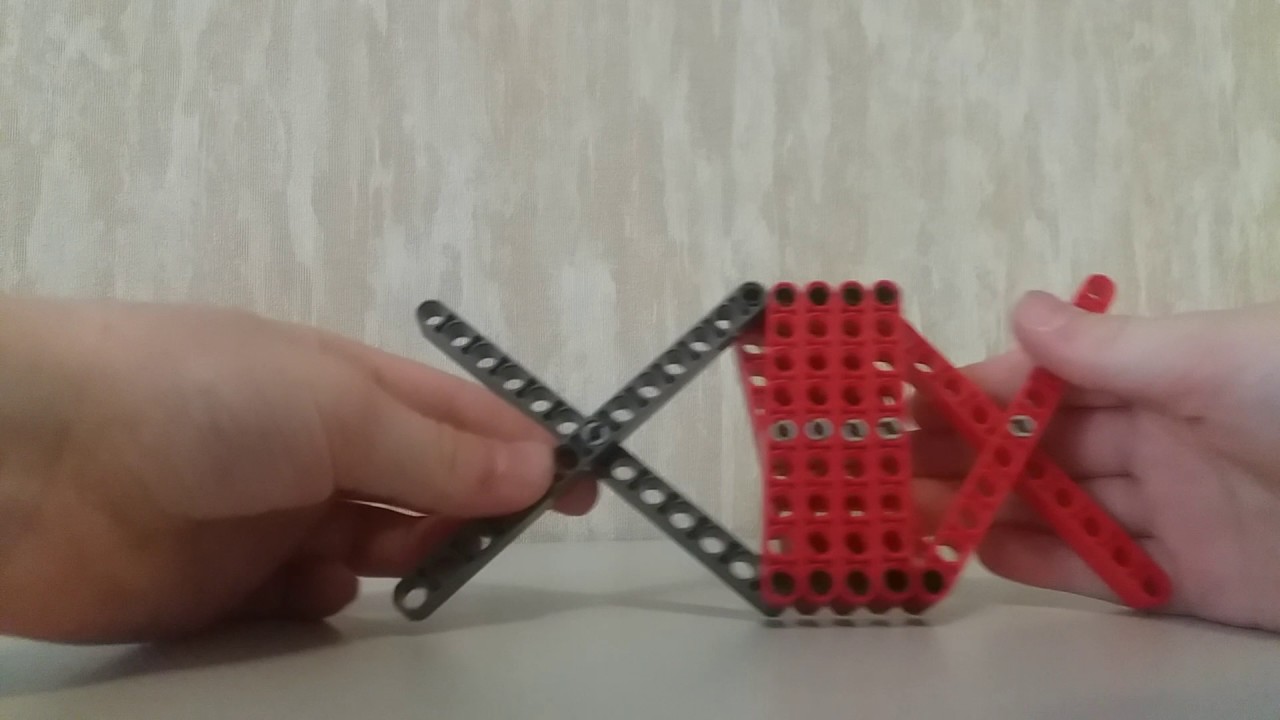 «Это очень приятно».
«Это очень приятно».
Самые ранние элементы Lego, представленные в Дании в конце 1940-х годов, состояли в основном из прямоугольных деталей нескольких цветов. Согласно онлайн-базе данных Brickset, в течение следующего десятилетия были добавлены двери и крыши, а также деревья, кусты, дорожные знаки и изогнутые пластины. К тому времени, когда его начали экспортировать в США, в 1961 году, наборы стали более сложными, копируя самолеты, лодки и пожарные части.
Но к концу 1990-х годов компания была на твердой почве. Простой пластиковый кирпич потерял популярность, поскольку дети увлеклись видеоиграми, компьютерами и увлечениями, такими как цифровой питомец Тамагочи. Lego сообщила о своем первом убытке в 1998 году.
В следующем году Lego заключила свою первую лицензионную сделку с франшизой «Звездных войн», что «в основном спасло компанию», — сказал отраслевой аналитик Крис Бирн. Годовые продажи подскочили почти на 30 процентов в том году, поскольку Lego сместила акцент с открытых игр на более брендовые наборы. Затем последовали аналогичные лицензионные соглашения с Disney, Marvel Super Heroes и Harry Potter. В прошлом году Lego получила прибыль в размере 1,2 миллиарда долларов при продажах в 5,4 миллиарда долларов.
Затем последовали аналогичные лицензионные соглашения с Disney, Marvel Super Heroes и Harry Potter. В прошлом году Lego получила прибыль в размере 1,2 миллиарда долларов при продажах в 5,4 миллиарда долларов.
Несмотря на это, Lego сталкивается со многими из тех же встречных ветров, что и его конкуренты. С 2018 года рост продаж стабильно составляет около 4 процентов, что резко упало по сравнению со среднегодовым показателем в 17 процентов предыдущего десятилетия. Конкуренция растет — не только со стороны других производителей игрушек, но также со стороны смартфонов и приложений, которые отнимают большую часть детских пособий.К тому же, как говорят аналитики, сегодняшние родители предпочли бы тратить деньги на впечатления, чем на вещи. По данным исследовательской компании NPD Group, продажи игрушек в США за первые девять месяцев этого года упали примерно на 5,5%.
Продажа взрослым кубиков — головоломок или фигурок — стала для производителей игрушек одним из способов противодействовать замедлению темпов роста. Такие конкуренты, как Playmobil, тоже обращают на это внимание, развертывая программы, которые, по их словам, помогут корпоративным сотрудникам «найти новые бизнес-решения».
Такие конкуренты, как Playmobil, тоже обращают на это внимание, развертывая программы, которые, по их словам, помогут корпоративным сотрудникам «найти новые бизнес-решения».
«Рост числа взрослых фанатов движет индустрией игрушек», — сказал Бирн, консультант из Нью-Йорка, который называет себя игрушечным парнем.«Как вы думаете, кто покупает Звезду Смерти за 499 долларов или Замок Хогвартс за 399 долларов? Все это сделано для взрослых, у которых есть собственные деньги, которые они могут тратить ».
Gen X nostalgia
Прием заявок поступает десятками, и чаще всего они жаждут более ранней эпохи.
Прокрутите Lego Ideas, краудсорсинговую платформу, которую компания представила в 2008 году, и вы увидите предложения по декорациям, посвященным мюзиклу 1964 года «Мэри Поппинс» и «Золотые девушки», ситкому NBC, который попал в эфир в 1985 году.Поклонники Lego голосуют за своих фаворитов, и каждый год группа экспертов освещает несколько проектов. Среди недавних утверждений — набор к 30-летию «Охотников за привидениями», машина времени DeLorean из фильма 1985 года «Назад в будущее» и желтая подводная лодка в стиле Битлз.
Среди недавних утверждений — набор к 30-летию «Охотников за привидениями», машина времени DeLorean из фильма 1985 года «Назад в будущее» и желтая подводная лодка в стиле Битлз.
«Существует так много ностальгии, особенно среди поколения X», — сказал Капа Крус из Lego.
Это поколение американцев, зажатых между бэби-бумером и миллениалами, было первым, кто вырос с Lego, сказал Бирн. Сейчас им за 40 и 50, и они входят в растущую группу взрослых, которые надеются отключиться от своих телефонов и компьютеров.
Когда Брук Дисон шесть лет назад открыла пространство для проведения мероприятий из блоков, она представила себе вечеринки по случаю дня рождения, наполненные конструктором Lego, летние лагеря и молодежные лиги.
Но она быстро нашла другую группу, которая требовала поиграть: родители.
Сейчас она регулярно проводит вечера только для взрослых, где местные жители потягивают вино и собирают декорации «Доктор Кто» и репродукции дома Фоллингуотер Фрэнка Ллойда Райта.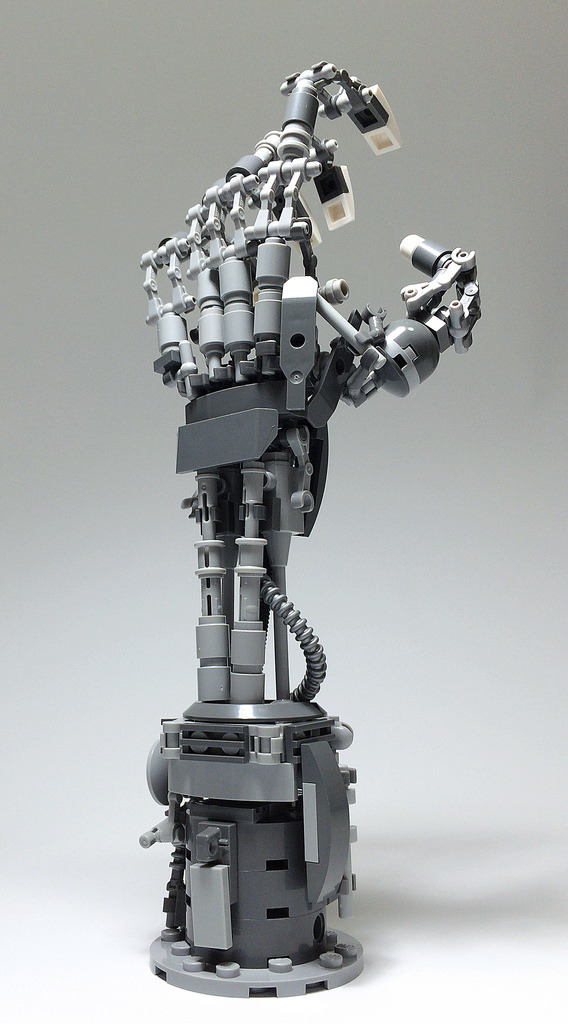 Одна группа отцов в течение двух лет работала над имперским звездным разрушителем из 1366 частей.
Одна группа отцов в течение двух лет работала над имперским звездным разрушителем из 1366 частей.
«Это как взрыв в прошлое, прямо в наше детство, — сказал 40-летний Дисон, живущий в Коннеллсвилле, штат Пенсильвания. — Это застало меня врасплох, но в этом есть смысл: жизнь так структурирована. Но с Lego ты можешь все ».
У Дисон есть несколько миллионов деталей Lego, которые она систематизирует по типу и цвету. По ее словам, наборы «Звездные войны» и «Архитектура» наиболее популярны среди взрослых, которые почти всегда ищут инструкции по эксплуатации.
«Приходят младшие, и все дело в их воображении — притворяться, строить зомби-города», — сказала она.«Но в какой-то момент это теряется. Взрослые, кажется, ценят окончательно законченный проект. Вот где они получают удовольствие ».
5 навыков, которые можно развить с помощью LEGO Play
Этот пост может содержать партнерские ссылки, что означает, что я могу зарабатывать деньги, когда вы совершаете покупки через них.
Шаринг — это забота!
LEGO — один из главных подарков, которые дети любят, но они понятия не имеют, что одновременно учатся. Если у вас есть кубики LEGO, не бойтесь позволять детям играть, потому что они приобретают массу навыков во время игры.Ознакомьтесь с этими 5 навыками, которые можно развить в игре LEGO.
Поскольку LEGO довольно малы, действительно здорово наблюдать, как ваш ребенок развивает координацию рук и глаз. Строя, они используют свои руки по-новому и увлекательно. Подумайте, насколько полезна для вас координация рук и глаз в повседневной жизни.
Учитывая, что когда вы впервые покупаете наборы LEGO, вы должны следовать инструкциям по их сборке, ваш ребенок здесь осваивает большой навык. Многие дети уже не умеют следовать указаниям, поэтому приятно, когда ваш ребенок получает дополнительную практику.Подумайте, насколько хорошо этот навык подойдет вашему ребенку в жизни.
LEGO великолепны по многим причинам, но один из лучших навыков, который ваш ребенок развивает, используя их, — это независимость. Большинство детей, которые играют с этими крошечными кубиками, хотят научиться делать это самостоятельно. Они определенно не хотят, чтобы вы держали их за руку все время. Независимость — отличный навык, которому может научиться ребенок любого возраста.
Большинство детей, которые играют с этими крошечными кубиками, хотят научиться делать это самостоятельно. Они определенно не хотят, чтобы вы держали их за руку все время. Независимость — отличный навык, которому может научиться ребенок любого возраста.
Если вы собираетесь научить своего ребенка чему-то в жизни, он может научиться этому, играя с LEGO.Поскольку эти устройства такие дорогие и ценные, вашему ребенку захочется каждый раз убирать их. И если они не уберут их, им потребуется всего один раз наступить на LEGO, чтобы усвоить урок.
Да, дети от природы обладают творческими наклонностями, но так приятно, когда им предлагают что-то, что помогает им развить эти навыки. LEGO — один из лучших способов побудить вашего ребенка к творчеству. Позвольте вашему ребенку использовать LEGO для строительства, исследования и творчества.Старайтесь не ограничивать их, когда дело доходит до творчества. Ваши дети могут удивить вас больше, чем вы когда-либо думали.
Замечательно использовать LEGO, чтобы помочь вашему ребенку развить любой из этих 5 навыков.